

Schlagwort: ‘Industrial Robotics’
Inspirierender Gastvortrag von FANUC Deutschland

Wir hatten das große Vergnügen, Frank Schwabe von FANUC Europe – Technical Center RO zu einem spannenden Gastvortrag in unserem Kurs „Robotic Systems” begrüßen zu dürfen. Herr Schwabe gab unseren Studierenden eine spannende Einführung in die Industrierobotik und stellte die Technologien, das Produktportfolio und reale Anwendungen von FANUC in der Automatisierung vor. Die Studierenden waren hoch motiviert, stellten viele aufschlussreiche Fragen und erhielten wertvolle Einblicke, wie moderne Robotik die heutigen Fertigungsumgebungen prägt. Ein großes Dankeschön an Herrn Schwabe und FANUC für ihre Unterstützung und die Inspiration der nächsten Generation von Ingenieuren!
Bronze bei der Deutschen Meisterschaft in Robot System Integration

Herzlichen Glückwünsch an Esteban und Gregory – sie haben bei der diesjährigen Meisterschaft bei FANUC in Neuhausen den 3. Platz belegt und damit Bronze gewonnen!
Die Aufgabe: Eine anspruchsvolle Batteriebestückung, die in nur drei Tagen gelöst werden musste. Das Niveau war dieses Jahr besonders hoch und zum ersten Mal waretn acht Teams dabei.
Wir sind sehr stolz auf unsere beiden Talente! Vielen Dank an Sophie Charlotte, die diese Teilnahme möglich gemacht hat!
Ansprechpartnerin:
Sophie Charlotte Keunecke
Kollaborierender Roboter bei Ford schafft Jobs für leistungsgewandelte Beschäftige
- Ford richtet mit Hilfe eines kollaborierenden Roboters einen Arbeitsplatz für Beschäftigte mit Schwerbehinderung ein
- Einzigartig ist die enge räumliche Zusammenarbeit zwischen Mensch und Roboter
- Nach ersten Probeläufen reibungslose Zusammenarbeit
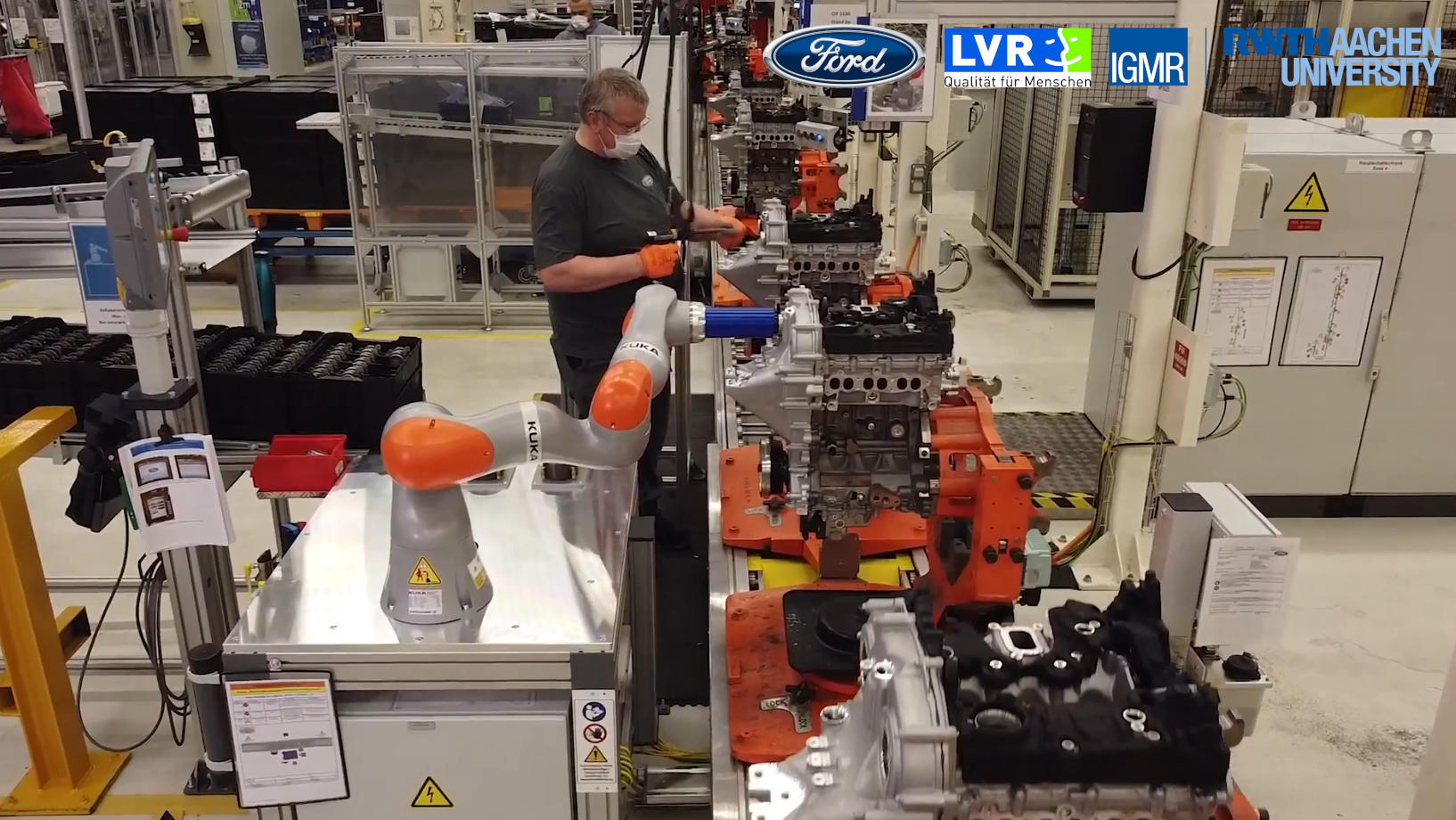
- Ford hat zusammen mit der Rheinisch Westfälischen Technischen Hochschule Aachen (RWTH) und dem Landschaftsverband Rheinland (LVR) diesen einmaligen Arbeitsplatz mit einer neuen Version eines kollaborierenden Roboters eingerichtet
AACHEN, 16. August 2021 – Ford hat die Einrichtung eines einzigartigen kollaborierenden Roboters erfolgreich abgeschlossen. Nach rund einem Jahr Forschung, Entwicklung, Mitarbeiterschulung und Trockenläufen arbeitet der so genannte Kobot, ein Wortspiel aus kollaborierend (zusammenarbeitend) und Roboter, nun taktgebunden im Linienfluss im Kölner Motorenwerk des Automobilherstellers. Dort setzt er gemeinsam mit seinem menschlichen Partner VCT-Magnetspulen in einen Öler ein, nimmt die Magnetspulen anschließend auf und presst sie in den Stirndeckel des Motorblocks. Diese Arbeit erfordert große Eindruckkräfte, die selbst für gesunde Arbeitende auf Dauer belastend sein können, und die nun der Kobot für den Menschen übernimmt. Bei den menschlichen Partnern handelt es sich um Beschäftigte mit Schulter- und Handgelenkproblemen. So konnte ein Arbeitsplatz für zwei Beschäftigte mit Schwerbehinderung geschaffen werden.
Ford, die Rheinisch Westfälisch Technische Hochschule in Aachen (RWTH) sowie der Landschaftsverband Rheinland (LVR) forschten rund ein Jahr lang an dieser neuen Einsatzmöglichkeit für einen kollaborierenden Roboter. Das vom LVR mit 372.000 Euro geförderte Modellprojekt hatte das Ziel, den Roboter dergestalt in eine Fertigung einzubauen, dass ein schwerbehinderter Mensch sich einen Arbeitsplatz mit einem Roboter teilt. Das Besondere daran ist die Konfiguration des Roboters, so dass er mit dem Menschen interaktiv „Hand in Hand“ arbeitet und nicht durch eine trennende Schutzeinrichtung, wie z.B. einen Maschinenschutzzaun, getrennt sein muss. Neben der exakten Programmierung des Roboters war auch eine intensive Schulung der Beschäftigten nötig, damit sie einerseits die „Scheu“ vor diesem Kobot ablegen, zum anderen trotzdem noch die nötige Vorsicht walten lassen. Roboter werden seit vielen Jahrzehnten in der Automobilindustrie eingesetzt, allerdings zumeist als überdimensional große Maschinen, die hinter Schutzvorrichtungen arbeiten oder als autonome Fahrroboter, die Materialien transportieren. In diesem Fall bestand die Herausforderung darin, den Arbeitsplatz so zu gestalten, dass sowohl die Voraussetzungen der taktgebundenen Fertigung, die Anforderungen der Arbeitssicherheit als auch die barrierefreie Gestaltung des Arbeitsplatzes berücksichtigt sind.
„Ich bin stolz, dass wir mit diesem Vorzeigeprojekt einen Arbeitsplatz so umgestalten konnten, dass wir ein weiteres Angebot für leistungsgewandelte Beschäftigte haben“, so Dirk Heller, Geschäftsführer Fertigung Ford-Werke GmbH. „Die Akzeptanz unter der Belegschaft ist groß, und besonders die an diesem Arbeitsplatz eingesetzten Mitarbeiter freuen sich auf die neue Aufgabe.“
„Gemeinsam haben wir einen einzigartigen kollaborativen Arbeitsplatz in der Industrie umgesetzt. Ich kenne kaum solch erfolgreich umgesetzte Kollaborationsarbeitsplätze“, erklärt Mathias Hüsing, Professor an der RWTH Aachen. „Warum dieser Mangel? Die menschenzentrierte Arbeitsplatzplanung unter Berücksichtigung von Montageaufgaben, technischen Möglichkeiten und Sicherheitsanforderungen ist (noch) nicht etabliert. Unsere Forschung im Bereich kollaborativer Prozessplanung fokussiert dieses. Inzwischen setzen wir Kollaborationsarbeitsplätze erfolgreich bei anderen Projekten um, wo es darum geht, Arbeitsplätze für Menschen mit Behinderungen auf dem ersten Arbeitsmarkt mit Unterstützung von kollaborierenden Robotern einzurichten.“
„Mit den Mitteln der Ausgleichsabgabe hat das LVR-Inklusionsamt in den letzten Jahren schon auf sehr vielfältige Weise Arbeitsplätze bei Ford umgestalten und sichern können. Das ist eine über die Jahre gewachsene und sehr gute Kooperation zwischen Ford und LVR mit großem Nutzen für die Förderung von Inklusion auf dem Arbeitsmarkt“, ergänzt Christoph Beyer, Leiter des LVR-Inklusionsamtes. „Auch die Erkenntnisse aus dem aktuellen Modellprojekt Kobot helfen uns enorm dabei, die Beschäftigungsmöglichkeit von Menschen mit Behinderung erweitern und neue technische Entwicklungen nutzen zu können. Ford hat hier als großes Unternehmen im Rheinland eine bedeutende Vorbildunktion inne.“
Das Institut für Getriebetechnik, Maschinendynamik und Robotik der RWTH Aachen begleitet das Projekt wissenschaftlich und entwickelt dabei ein Strategiepapier auf Grundlage des im Projekt entstandenen Arbeitsplatzes. Dieses Strategiepapier ist dazu gedacht, die Umsetzung des Arbeitsplatzes für Menschen mit Behinderung im Detail zu beleuchten. In diesem Sinne werden die Veränderungen der Beschäftigungssituation für die Beschäftigten, die Wirtschaftlichkeit der Umsetzung, der Ablauf der Implementierung und die Unterschiede zur Implementierung einer klassischen Industrieroboterzelle sowie die sicherheitstechnischen Herausforderungen dargestellt, analysiert und dokumentiert. So ist gewährleistet, dass zukünftige Projekte von den Erfahrungen und Erkenntnissen aus dem vorliegenden Projekt profitieren.
Das LVR-Inklusionsamt ist zuständig für die Teilhabe schwerbehinderter Menschen auf dem allgemeinen Arbeitsmarkt im Rheinland. Es bietet sowohl für Arbeitgeber als auch für schwerbehinderte Menschen unterschiedliche Unterstützungsangebote an und arbeitet mit verschiedenen Partnern zusammen. Die Angebote umfassen beispielsweise finanzielle Förderung zur Schaffung von Arbeits- und Ausbildungsplätzen, zur behinderungsgerechten Einrichtung von Arbeitsplätzen oder bei außergewöhnlichen Belastungen während der Beschäftigung.
Kontakt
IGMR-Seminar 11.05.2021, 16:00 – 17:00 Uhr: Task Planning, Environment Representation and Reasoning in Agricultural and Industrial Robotics
Wir freuen uns Oscar Lima vom DFKI (Deutsches Forschungszentrum für Künstliche Intelligenz) aus Osnabrück als Vortragender beim nächsten Termin der IGMR Vortragsreihe im Sommersemester 21 zu haben. Der Titel seines Vortrags lautet Task Planning, Environment Representation and Reasoning in Agricultural and Industrial Robotics.
The focus of the talk will be on DFKI Osnabrück projects. Most of our work is related to agricultural robotics, perception, environment representation, reasoning and task planning. We start the talk with the concept of precision farming, how robots can assist there, to then look into route planning, environment representation, and some of its applications in navigation and expert systems. At the end of the talk we will finish with projects that are related with industry 4.0 and one which aims to provide a generic tool for AI planning in Europe. The talk is light and conceptual, I hope to catch your attention with interesting and new ideas!
Zoom Meeting Informationen:
11.05.2021, 16:00 – 17:00 Uhr
https://rwth.zoom.us/j/95798557131?pwd=WDNoUmxLV3h4R2JTWVZWMWNSajhNZz09
Meeting-ID: 957 9855 7131
Kenncode: 917617
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
Die Veranstaltungen werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.


