

Schlagwort: ‘Industrial Scenario’
Kollaborierender Roboter bei Ford schafft Jobs für leistungsgewandelte Beschäftige
- Ford richtet mit Hilfe eines kollaborierenden Roboters einen Arbeitsplatz für Beschäftigte mit Schwerbehinderung ein
- Einzigartig ist die enge räumliche Zusammenarbeit zwischen Mensch und Roboter
- Nach ersten Probeläufen reibungslose Zusammenarbeit
- Ford hat zusammen mit der Rheinisch Westfälischen Technischen Hochschule Aachen (RWTH) und dem Landschaftsverband Rheinland (LVR) diesen einmaligen Arbeitsplatz mit einer neuen Version eines kollaborierenden Roboters eingerichtet
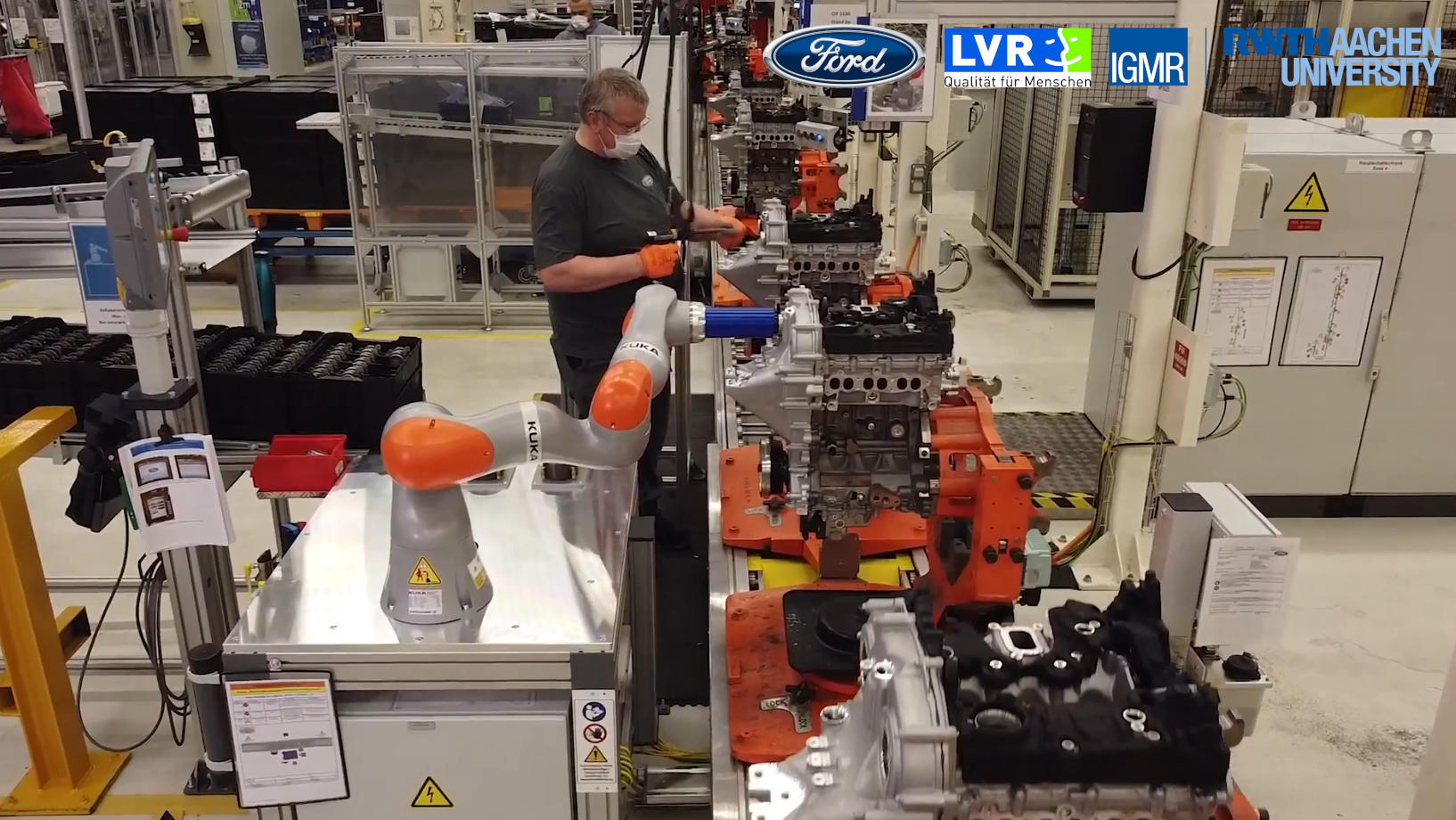
AACHEN, 16. August 2021 – Ford hat die Einrichtung eines einzigartigen kollaborierenden Roboters erfolgreich abgeschlossen. Nach rund einem Jahr Forschung, Entwicklung, Mitarbeiterschulung und Trockenläufen arbeitet der so genannte Kobot, ein Wortspiel aus kollaborierend (zusammenarbeitend) und Roboter, nun taktgebunden im Linienfluss im Kölner Motorenwerk des Automobilherstellers. Dort setzt er gemeinsam mit seinem menschlichen Partner VCT-Magnetspulen in einen Öler ein, nimmt die Magnetspulen anschließend auf und presst sie in den Stirndeckel des Motorblocks. Diese Arbeit erfordert große Eindruckkräfte, die selbst für gesunde Arbeitende auf Dauer belastend sein können, und die nun der Kobot für den Menschen übernimmt. Bei den menschlichen Partnern handelt es sich um Beschäftigte mit Schulter- und Handgelenkproblemen. So konnte ein Arbeitsplatz für zwei Beschäftigte mit Schwerbehinderung geschaffen werden.
Ford, die Rheinisch Westfälisch Technische Hochschule in Aachen (RWTH) sowie der Landschaftsverband Rheinland (LVR) forschten rund ein Jahr lang an dieser neuen Einsatzmöglichkeit für einen kollaborierenden Roboter. Das vom LVR mit 372.000 Euro geförderte Modellprojekt hatte das Ziel, den Roboter dergestalt in eine Fertigung einzubauen, dass ein schwerbehinderter Mensch sich einen Arbeitsplatz mit einem Roboter teilt. Das Besondere daran ist die Konfiguration des Roboters, so dass er mit dem Menschen interaktiv „Hand in Hand“ arbeitet und nicht durch eine trennende Schutzeinrichtung, wie z.B. einen Maschinenschutzzaun, getrennt sein muss. Neben der exakten Programmierung des Roboters war auch eine intensive Schulung der Beschäftigten nötig, damit sie einerseits die „Scheu“ vor diesem Kobot ablegen, zum anderen trotzdem noch die nötige Vorsicht walten lassen. Roboter werden seit vielen Jahrzehnten in der Automobilindustrie eingesetzt, allerdings zumeist als überdimensional große Maschinen, die hinter Schutzvorrichtungen arbeiten oder als autonome Fahrroboter, die Materialien transportieren. In diesem Fall bestand die Herausforderung darin, den Arbeitsplatz so zu gestalten, dass sowohl die Voraussetzungen der taktgebundenen Fertigung, die Anforderungen der Arbeitssicherheit als auch die barrierefreie Gestaltung des Arbeitsplatzes berücksichtigt sind.
„Ich bin stolz, dass wir mit diesem Vorzeigeprojekt einen Arbeitsplatz so umgestalten konnten, dass wir ein weiteres Angebot für leistungsgewandelte Beschäftigte haben“, so Dirk Heller, Geschäftsführer Fertigung Ford-Werke GmbH. „Die Akzeptanz unter der Belegschaft ist groß, und besonders die an diesem Arbeitsplatz eingesetzten Mitarbeiter freuen sich auf die neue Aufgabe.“
„Gemeinsam haben wir einen einzigartigen kollaborativen Arbeitsplatz in der Industrie umgesetzt. Ich kenne kaum solch erfolgreich umgesetzte Kollaborationsarbeitsplätze“, erklärt Mathias Hüsing, Professor an der RWTH Aachen. „Warum dieser Mangel? Die menschenzentrierte Arbeitsplatzplanung unter Berücksichtigung von Montageaufgaben, technischen Möglichkeiten und Sicherheitsanforderungen ist (noch) nicht etabliert. Unsere Forschung im Bereich kollaborativer Prozessplanung fokussiert dieses. Inzwischen setzen wir Kollaborationsarbeitsplätze erfolgreich bei anderen Projekten um, wo es darum geht, Arbeitsplätze für Menschen mit Behinderungen auf dem ersten Arbeitsmarkt mit Unterstützung von kollaborierenden Robotern einzurichten.“
„Mit den Mitteln der Ausgleichsabgabe hat das LVR-Inklusionsamt in den letzten Jahren schon auf sehr vielfältige Weise Arbeitsplätze bei Ford umgestalten und sichern können. Das ist eine über die Jahre gewachsene und sehr gute Kooperation zwischen Ford und LVR mit großem Nutzen für die Förderung von Inklusion auf dem Arbeitsmarkt“, ergänzt Christoph Beyer, Leiter des LVR-Inklusionsamtes. „Auch die Erkenntnisse aus dem aktuellen Modellprojekt Kobot helfen uns enorm dabei, die Beschäftigungsmöglichkeit von Menschen mit Behinderung erweitern und neue technische Entwicklungen nutzen zu können. Ford hat hier als großes Unternehmen im Rheinland eine bedeutende Vorbildunktion inne.“
Das Institut für Getriebetechnik, Maschinendynamik und Robotik der RWTH Aachen begleitet das Projekt wissenschaftlich und entwickelt dabei ein Strategiepapier auf Grundlage des im Projekt entstandenen Arbeitsplatzes. Dieses Strategiepapier ist dazu gedacht, die Umsetzung des Arbeitsplatzes für Menschen mit Behinderung im Detail zu beleuchten. In diesem Sinne werden die Veränderungen der Beschäftigungssituation für die Beschäftigten, die Wirtschaftlichkeit der Umsetzung, der Ablauf der Implementierung und die Unterschiede zur Implementierung einer klassischen Industrieroboterzelle sowie die sicherheitstechnischen Herausforderungen dargestellt, analysiert und dokumentiert. So ist gewährleistet, dass zukünftige Projekte von den Erfahrungen und Erkenntnissen aus dem vorliegenden Projekt profitieren.
Das LVR-Inklusionsamt ist zuständig für die Teilhabe schwerbehinderter Menschen auf dem allgemeinen Arbeitsmarkt im Rheinland. Es bietet sowohl für Arbeitgeber als auch für schwerbehinderte Menschen unterschiedliche Unterstützungsangebote an und arbeitet mit verschiedenen Partnern zusammen. Die Angebote umfassen beispielsweise finanzielle Förderung zur Schaffung von Arbeits- und Ausbildungsplätzen, zur behinderungsgerechten Einrichtung von Arbeitsplätzen oder bei außergewöhnlichen Belastungen während der Beschäftigung.
Kontakt
Automatisierte Aufgabenplanung in industriellen Szenarien

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Die automatisierte Aufgabenplanung ist eine übergeordnete Steuerungsstrategie, die in Szenarien mit kollaborierenden Menschen und Robotern verwendet werden kann. Diese Strategie ist dazu nötig, um die Akteure und die auszuführenden Aufgaben zu bestimmen, welche zum Erreichen des Ziels ausgeführt werden müssen.
Für das folgende Industrieszenario werden mit dieser Strategie die Aufgaben berechnet, welche durch den Menschen und das FTS, also den beiden Agenten, ausgeführt werden müssen. Am Ende der Ausführung allen geplanten Aktionen sollen alle Gegenstände mit der Handbohrmaschine oder dem Nietwerkzeug bearbeitet wurden.
Die geplanten Aktionen werden zur Ausführung über ein spezielles Framework gesendet, welches in das Robot Operating System (ROS) integriert ist. Jede geplante Aktion wird über so genannte „Action Interfaces“ auf ihre konkrete Ausführung in der Simulation abgebildet. Im industriellen Szenario sind lediglich endliche Zustandsmaschinen als Action Interfaces integriert, wobei deren Zustände Akteur-spezifische Aufrufe an verschiedene ROS-Module darstellen.
Ansprechpartner:


