

Kategorie: ‘Mobile Robotik’
IGMR Seminar 26.01.2021: Robert Grafe, Deutsches Rettungsrobotik-Zentrum e.V.
Unbemannte Systeme in der Gefahrenabwehr, der Aufbau des Deutsches Rettungsrobotik-Zentrums.
https://youtu.be/anZtJAajQy0
Wir begrüßen Herrn Grafe vom DRZ zum IGMR Seminar. Auch dieser Veranstaltung wird weiterhin virtuell durchgeführt:
Unbemannte Systeme in der Gefahrenabwehr, der Aufbau des Deutsches Rettungsrobotik-Zentrums Die Nutzung unbemannter, bodengebundener Systeme bietet großes Potential, Einsatzkräfte von Hilfsorganisationen und Feuerwehren bei besonders gefährlichen oder zeitraubenden Einsätzen zu unterstützen. Auf Grund der anspruchsvollen Aufgaben und Szenarien ist der Sprung von der Forschung in die reale Nutzung jedoch bisher nur vereinzelt geglückt. Der Vortrag stellt diesen Stand von Forschung und Entwicklung dar und beschreibt den Ansatz, welcher mit der Gründung des Deutschen Rettungsrobotik-Zentrums beschritten wird, um die Realisierung von praxis-/ und produktnahen Lösungen zu fördern.
Dienstag, 26. Januar 2021 16:30 Uhr in Zoom
Zoom Meeting Informationen:
https://rwth.zoom.us/j/98454895570?pwd=NkpiSWkyaTJtdWlralJrSUtnMDdDZz09
Meeting-ID: 984 5489 5570
Kenncode: 186393
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
Die Veranstaltungen im Wintersemester 2020/2021 werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
Weitere Informationen können auch dem Blog-Beitrag IGMR als Mitglied des Deutsches Rettungsrobotikzentrum e.V entnommen werden.
Ansprechpartner:
IGMR als Mitglied des Deutsches Rettungsrobotikzentrum e.V.
Das IGMR ist seit diesem Jahr ordentliches Mitglied des „Deutsches Rettungsrobotikzentrum e.V.“. Dieses vom BMBF geförderte Kompetenzzentrum beschäftigt sich mit der Forschung an robotischen Themen im Bereich Feuerwehr, Polizei und Katastrophenschutz zusammen mit Partnern aus öffentlichem Dienst, Forschung und Anwendern. Kürzlich wurden die Arbeiten am ersten Abschnitt des Testgeländes in Dortmund abgeschlossen. Einen ersten Eindruck bieten die beigefügten Videos des „Deutsches Rettungsrobotikzentrum e.V.“.
Szenariofilm:
https://youtu.be/_EnzZrXJwJo
Meilensteintreffen:

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Internetseite:
https://rettungsrobotik.de/
Ansprechpartner:
Prof. Mathias Hüsing
IGMR Seminar: Dr. Michael Cashmore – Plan-Based Robot Control in Real-Time

Mit dem Vortrag von Dr. Miachel Cashmore von der University of Strathclyde startet die virtuelle IGMR Vortragsreihe im Wintersemester 20/21. Wir freuen uns auf einen Einblick in ROSPlan und Plan-Based Robot Control in Real-Time.
Mittwoch, 2. Dezember 2020 16:30 Uhr in Zoom Zoom Meeting Informationen: https://rwth.zoom.us/j/98454895570?pwd=NkpiSWkyaTJtdWlralJrSUtnMDdDZz09 Meeting-ID: 984 5489 5570, Kenncode: 186393
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
The topic of the seminar will focus on the numerous temporal and numeric challenges that arise in plan execution. If a plan is produced with some flexibility, how it can be executed? In this context the properties of temporal controllability, robustness envelopes, replanning in-situ, and planning concurrently to execution, deliberation in a system of distributed components, in which your actions can affect other parts of a larger system will be discussed.
Die Veranstaltungen im Wintersemester 2020/2021 werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
Robot Companion: Ein mobiler Helfer in der Not
Robot Companion ist ein Framework, mit dem Roboterverfolgersysteme einfach und kostensparend umgesetzt werden können. Dazu entwickelt das IGMR Methoden zum Tracking mit unterschiedlicher Sensorik (Laser, Radar, Kamera), agiler Pfadplanung und Ansteuerung.
Das aktuelle Anwendungsziel von Robot Companion ist es, einen Roboter für Notretter bereitzustellen. Dabei folgt der Roboter den Einsatzkräften autonom und ermöglicht den Transport von Material und Ausrüstung, sowie den Abtransport von Schutt und Verunglückten. Ein erster Weg zu dieser Vision wurde mit dem Grundmodul umgesetzt. Das Grundmodul verfügt über Methoden zum Tracking mit Kamera und Laser und ermöglicht die autonome Verfolgung eines Operators.
Im Video zu erkennen sind die Tracks des vertikalen und horizontalen Trackers, sowie der Zustand der Detektion (oben rechts). In einem Verfolgungstest konnte eine Genauigkeit von 100% bei niedrigen Geschwindigkeiten erreicht werden.
https://youtu.be/imU8j2zlQrQ
Projektseite:
https://www.igmr.rwth-aachen.de/index.php/de/rob/rob-comp
Ansprechpartner:
SLAM Validierung mittels iGPS

Zur Validierung von Lokalisierungs- und Kartierungsalgorithmen (SLAM) für mobile Roboter verwenden wir am IGMR das indoor Global Positioning System von Nikon.
Die gleichzeitige Erfassung der eigenen Position und die Kartierung der Umgebung ist ein klassisches Problem in der mobilen Robotik und nach wie vor ein aktuelles Forschungsthema. Insbesondere die Steigerung von Genauigkeit, Allgemeingültigkeit und Robustheit sind Ziele aktueller Entwicklungen. Aus diesem Grund validieren wir unsere Algorithmen in der mobilen Robotik mit dem Nikon iGPS, um auch für große Szenarien eine Ground Trouth mit einer Frequenz von 40 Hz und einer Genauigkeit von 0,2 mm nutzen zu können. Auf diese Weise können kritische Ungenauigkeiten und Loop Closure Methoden deutlich besser quantifiziert und analysiert werden.
Projektseite:
Bots2Rec
Ansprechpartner:
Simon Schläger
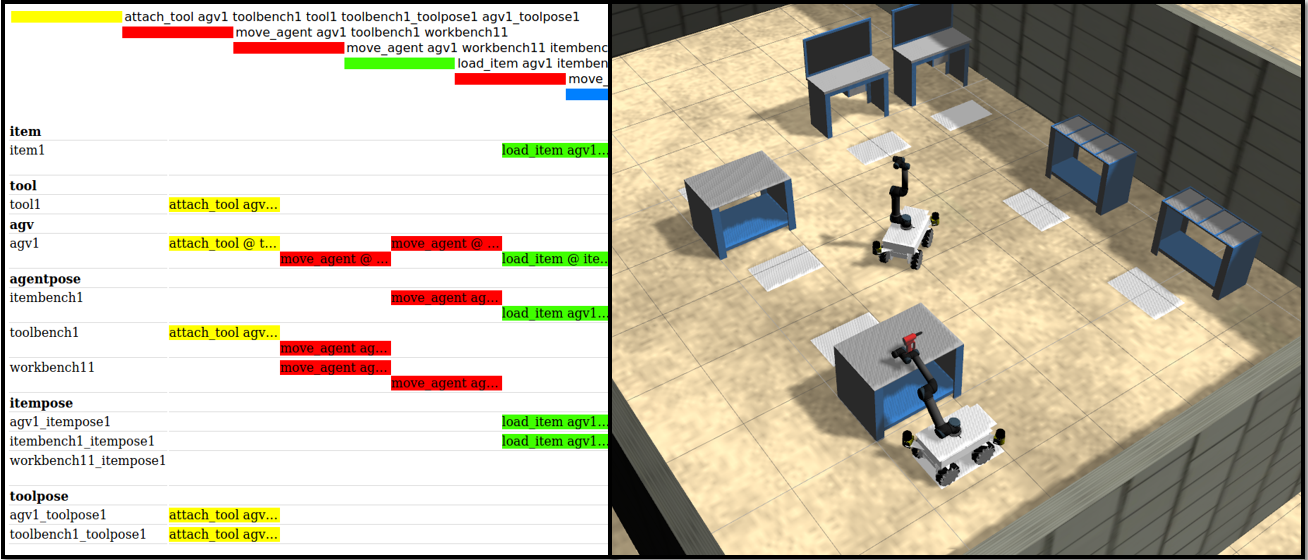
Ausführung der geplanten Aktionen in CoppeliaSim
Implementierung von ROS Action Interfaces zur Verbindung von AI-Aufgabenplanung-Framework ROSPlan mit Simulationssoftware CoppeliaSim
Ansprechpartner:
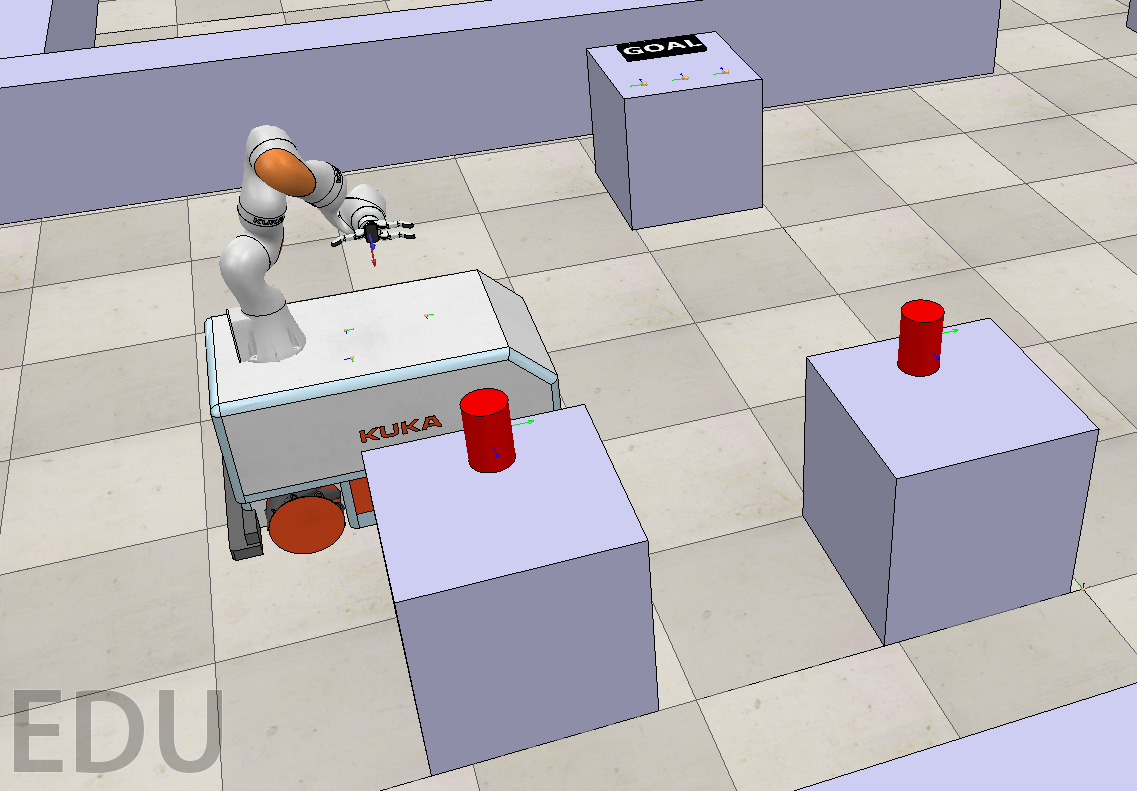
Aufgabenplanung in industriellen Szenario
Zur Verbesserung von automatischen Planungsalgorithmen für Szenarien mit kollaborierenden Akteuren kommen PDDL-Modellierung, ROSPlan und Gazebo-Simulationen zum Einsatz.
Ansprechpartner:
Mobiler DIY Low Cost Roboter für Studierende

Robotik bedeutet nicht immer teure Hardware. Auch mit simpler Hardware können Studierende erste Erfahrungen in der mobilen Robotik sammeln.
Ansprechpartner:


