

Kategorie: ‘Trajektorienplanung’
IGOR Tper: der Roboter mit nicht-sphärischem Handgelenk


Die nächste Generation unseres Roboters ist entworfen. Der neue Roboter heißt IGOR Tper. Dieser Roboter hat ein nicht sphärisches Handgelenk, wodurch die Bewegungsplanung für den Roboter anspruchsvoll wird.
Ansprechpartner:
Markus Schmitz
Multidirektionale Additive Fertigung im Lichtbogenschweißverfahren

Im Zusammenarbeit mit dem ISF, RWTH Aachen forschen wir am IGMR an der Multidirektionalen Additiven Fertigung. In dieser Anwendung zur Herstellung von Metallbauteilen.
Die Multidirektionale Additive Fertigung ermöglicht sowohl im klassischen FDM-Verfahren mit Kunststoff als auch bei schichtweisen Aufbau im Lichtbogenschweißverfahren die Herstellung von komplexen Bauteilen ohne Stützstrukturen. Am IGMR wird dazu die gesamte Prozesskette der Additiven Fertigung auf die besonderen Herausforderungen dieses Verfahren aus robotischer Sicht erweitert. Dazu gehört die Zerlegung eines virtuellen Bauteils in Schichten (Slicing), die anschließende Planung eines kollisionsfreien Aufbaus, die Generierung von ausführbaren Roboterpfaden zum Ausfüllen der Schichten sowie der notwendigen Trajektorienplanung.
https://youtu.be/vYejNjBSUp8
Ansprechpartner:
Markus Schmitz
Carlo Weidemann
Igus Delta Demonstrator
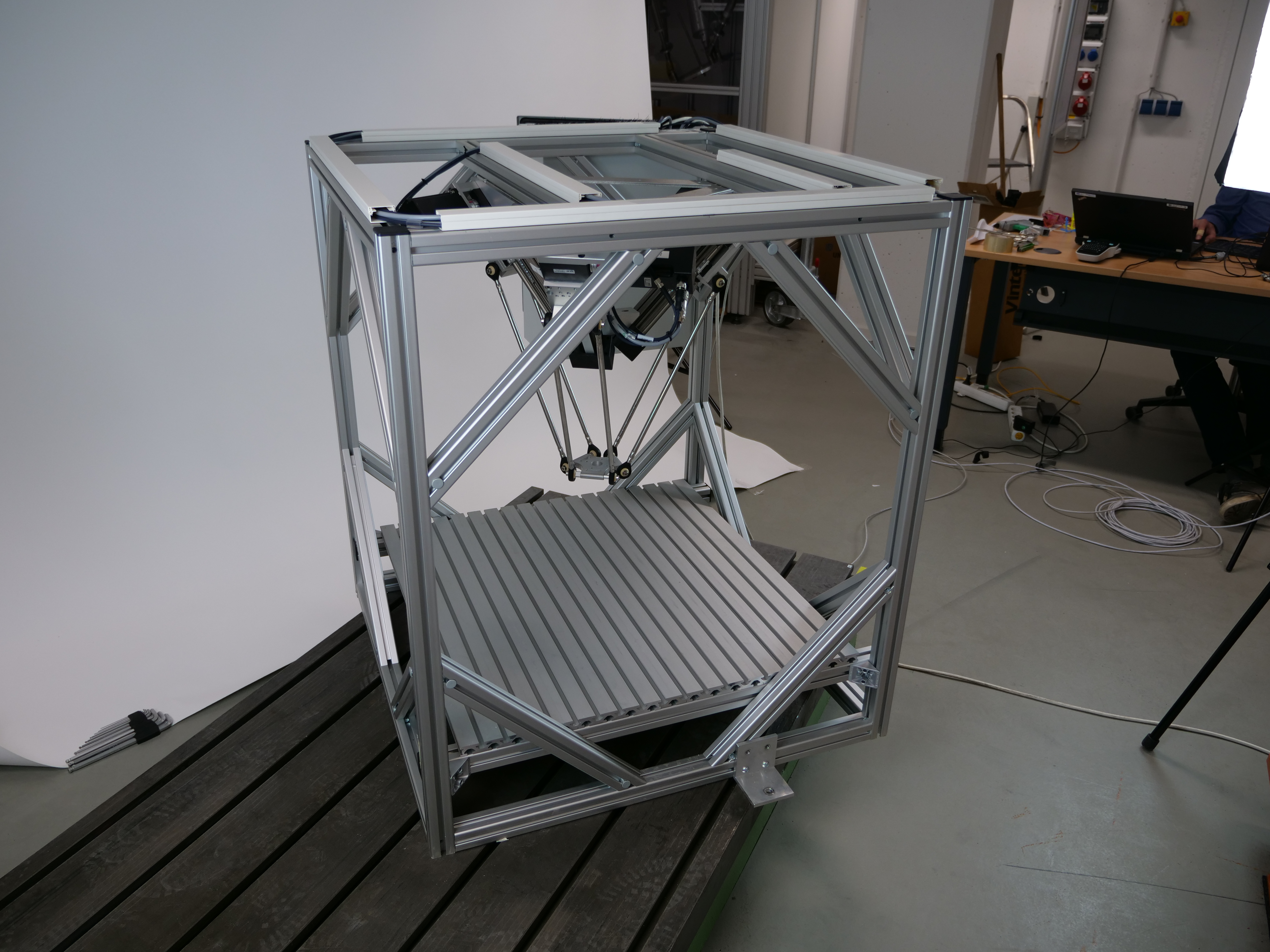
Sebastian Lüke entwickelte in Rahmen seiner Masterarbeit einen Demonstrator inkl. Steuerung, Trajektorienplanung und User Interface für die igus Delta Baukasten.
Ansprechpartner:


