

Kategorie: ‘Bewegungsplanung’
Erfolgreicher Beitrag auf der „Doors & Closures in Car Body Engineering 2024!

Prof. Hüsing hielt einen Vortrag zum Thema „Efficient Kinematics Development for Door and Closure Systems“. Außerdem konnten sich die 160 Konferenzteilnehmerinnen und Konferenzteilnehmer über die effiziente Auslegung von Bewegungseinrichtungen mittels des Programms „Mechanism Developer“ (MechDev) überzeugen.
Als Dankeschön für den Vortrag wurde für Prof. Hüsing ein Baum im Auftrag des Konferenzausrichters Automotive Circle gepflanzt. 🌳💚
Ansprechpartner:
Mathias Hüsing
IGMR Konsens im Sensor-Roboter-Netzwerk
Agile, frei vernetzte Montagesysteme zeichnen sich durch die sensorgestützte Kooperation mehrerer mobiler und stationärer Roboter aus. Die dynamische Rekonfiguration von Produktionslinien erfordert jedoch spezielle Steuerungsstrategien für Robotermanipulatoren. Es sollen schnelle und zuverlässige Bewegungsplanungs- und Steuerungsverfahren entwickelt werden, die auf Änderungen der Umgebung und der Sollwerte adäquat reagieren und ausführbare Bewegungen erzeugen. Diese Montagesysteme können dann in der Struktur eines Metamodells abgebildet werden, das zur Erstellung digitaler Schatten der Fabriken der Zukunft führt.
Kontakperson: Daniel Gossen
Das Video auf unserem Yotube Kanal: hier.
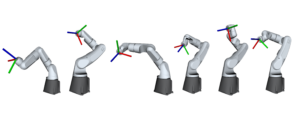
IGOR Tper: der Roboter mit nicht-sphärischem Handgelenk


Die nächste Generation unseres Roboters ist entworfen. Der neue Roboter heißt IGOR Tper. Dieser Roboter hat ein nicht sphärisches Handgelenk, wodurch die Bewegungsplanung für den Roboter anspruchsvoll wird.
Ansprechpartner:
Markus Schmitz
IGOR – unser hauseigener Roboter
Wir haben das Konzept des hauseigenen Roboters IGOR (https://blog.rwth-aachen.de/robotik/igor-konzept-eines-hauseigenen-6-achs-roboters/) weiter entwickelt. Nun stehen verschiedene Konfigurationen des Roboters mit einer unterschiedlichen Anzahl von Freiheitsgraden zur Verfügung. Jede Konfiguration hat auch eine unterschiedliche Art von Handgelenk und Arm. Alle Modelle sind über Robot Operating System ROS steuerbar.
Ansprechpartner:
Robotergeführte Formenerkennung und Beschichtung

Automatische Formerkennung über Laserscanner und Trajektorienplanung für die Beschichtung.
Im Rahmen dieses Projekts werden die Formen erkannt und ihre Kanten durch einen Laserscanner realisiert, der am Endeffektor des Roboters montiert ist. Die gesammelten Daten werden synchronisiert und gefiltert, und es wird eine geeignete Trajektorie für die Beschichtung der Innenfläche der Formulare erstellt. Mehrere Variablen, wie z.B. die Geschwindigkeit der Düse, Abstände und Lücken, die Größe der Düse und der Outlier für eine homogene Beschichtung können während der Trajektorienplanung ausgewählt werden.
Das Projekt wurde in Kooperation mit International Partners in Glass Research e.V. durchgeführt.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
Kooperative mobile Manipulation in Produktionslinien im „Internet of Production“

Anwendungen der mobilen Manipulation in den Arbeitsumgebungen der „Factory of Future“.
Internet of Production (IoP) hat die Vision, die domänenübergreifende Zusammenarbeit in Produktionslinien auf einer neuen Ebene zu ermöglichen. Die Mobilisierung von Roboter-Agenten und Ressourcen sind die Essenzen der Produktionslinien der Fabrik der Zukunft. Um die Roboteragenten in die Lage zu versetzen, auf die Änderung der Produktionslinien zu reagieren, suchen wir im IGMR nach dynamischer Bewegungsplanung und -steuerung der mobilen Manipulatoren.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Weitere Informationen zum Internet of Production:
https://www.igmr.rwth-aachen.de/index.php/de/rob/rob-iop
https://www.iop.rwth-aachen.de
Ansprechpartner:


