

Kategorie: ‘Entwicklung und Konstruktion’
Simulation einer teilautomatisierten, robotischen Fliesenlegehilfe

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Im Rahmen des ErgoFli Projekts wird in Zusammenarbeit mit Projektpartnern ein innovatives System entwickelt, das Fliesenverlegern helfen soll, ihre Arbeit ergonomischer und effizienter zu gestalten.
In dem Video könnt ihr sehen, wie das System in der Simulationsumgebung Gazebo arbeitet. Der Roboter entnimmt automatisch Fliesen aus einem Magazin und passt sie perfekt zu den bereits verlegten Fliesen an. Mit automatischen Verfahren können mehrere Fliesen hintereinander verlegt werden, um den Arbeitsprozess zu optimieren.
Unser Ziel ist es, ein Hilfsmittel zu schaffen, das nicht nur die Arbeitsbelastung für Fliesenleger reduziert, sondern auch ihre Arbeitsumgebung verbessert. Wir sind begeistert von den Fortschritten und freuen uns darauf, euch bald weitere Einblicke zu geben!
Erfahre hier noch mehr über das Projekt.
Ansprechpartner:
Mark Witte
Jan Wiartalla
Rapid Prototyping in der Entwicklung von Roboterhardware

Im Rahmen des RobWeld-Projekts wurden neue Handgelenke und Greifmechanismen für den am IGMR entwickelten und gebauten PARAGRIP entwickelt. Durch iterative Designprozesse unter Verwendung von Rapid Prototyping im 3D-Druck haben wir Funktionalitäten, Montagefreundlichkeit und die Herstellbarkeit von Komponenten perfektioniert. Das Ergebnis? Eine ausgearbeitete Konstruktion, die Stahl- und Aluminiumkomponenten vereint. In einem nächsten Schritt kann das Design nun ausgiebig getestet werden bevor es am Roboter zum Einsatz kommt.
Hier könnt ihr weitere Informationen zum Projekt RobWeld finden.
Jan Wiartalla
Querschnittsgruppe: Application Dynamics

Das Team hinter Application Dynamics setzt sich aus allen Forschungsbereichen des IGMR zusammen. Auf diese Weise können die Fähigkeiten auf dem Gebiet der Schwingungsanalyse und Maschinendynamik optimal mit den Kompetenzen und langjährigen Erfahrungen rund um die Themen der Getriebetechnik und Robotik verein werden. Dieser Zusammenschluss Instituts interner Forschungsschwerpunkte, ermöglicht Problemlösungen in denen sowohl fachliche Kompetenzen der Dynamik als auch anwendungsspezifisches Fachwissen gefragt sind. Angewendet wird dieser Wissensquerschnitt beispielsweise in Form einer anforderungsbasierten Untersuchung und Ausnutzung der dynamischen Effekte eines Systems. Der Fokus liegt auf Anwendungen aus dem Bereich der Robotik und Getriebetechnik, erfasst darüber hinaus jedoch jegliche Arten mechanischer Bewegungseinrichtungen. Der aktuelle Forschungshorizont erstreckt sich von kinematischer Redundanz über high Speed Trajektorien bis hin zur Nutzung neuronaler Netze, mit welchen eine Erweiterung des Arbeitsraumes durch innovative Objektmanipulation erreicht wird.
Ansprechpartner: Johannes Bolk
Vorstellung des Projekts „ErgoFli“ auf dem KT-Kolloquium 2022

Das Ziel des ZIM-geförderten Projekts „ErgoFli“ ist es, eine intelligente, halbautomatisierte Fliesenlegehilfe zu entwickeln. Diese soll nicht ergonomische Haltungen von Fliesen legenden Personen durch ihre intuitive Benutzerschnittstelle, das automatisierte Handhaben von Fliesen und Fliesenkleber sowie eine intelligente Steuerung um bis zu 66% reduzieren. Der ErgoFli kann mit einem motorisierten Antrieb verfahren werden und nutzt eine lineare Verlegekinematik zum Verlegen von Fliesen ohne direkten Wandkontakt im Buttering-Floating-Verfahren. Es können Fliesen in den beiden Formaten 30×60 cm bzw. 60×60 cm im Kreuzverband verlegt werden. Der Roboter besitzt Speicher für Fliesen und Fliesenkleber, sodass er mindestens 30 Minuten ohne Nachfüllen verwendet werden kann und schafft eine Verlegeleistung von 12 m2 in der Stunde bei gleichzeitiger Gewährleistung der entsprechenden normgerechten Ebenheitstoleranzen.
Mithilfe eines digitalen Zwillings konnte bereits ein früher Prototyp in verschiedenen Szenarien getestet werden. Während die Konstruktion des Prototyps in gängiger CAD-Software erfolgt, wird das jeweils aktuelle Modell parallel in die Simulationsumgebung Gazebo eingebunden. Dies ermöglicht das kontinuierliche Integrieren und Testen von Softwarepaketen der Steuerung in anwendungsnahen Szenarien. Über eine Closed-Loop Simulation können beispielsweise reale Testdaten an den digitalen Zwilling übertragen werden. So werden die drei Laser-Profilsensoren des Fliesengreifers sowieso Sauggreifer auf einem prototypischen Greifer befestigt und an einem UR10 Roboterarm montiert. Die Messwerte der Sensoren können dann trotz unterschiedlicher Kinematiken auf den digitalen Zwilling in der Simulation übertragen werden. Auf diese Weise kann die Positionsregelung des Greifers über die Vermessung der Fugenbreiten bereits frühzeitig im Gesamtsystem integriert werden.
Ansprechpartner:
Jan Wiartalla
Marius Gürtler
Integrierte AI-Aufgabenplanung und Schraubenerkennung in einem Fertigungsszenario

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Das Video findet ihr auch auf unserem Youtube-Kanal.
Ansprechpartner:
Daniel Gossen
IGOR – unser hauseigener Roboter
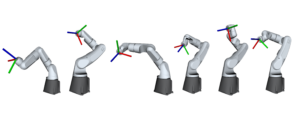
Wir haben das Konzept des hauseigenen Roboters IGOR (https://blog.rwth-aachen.de/robotik/igor-konzept-eines-hauseigenen-6-achs-roboters/) weiter entwickelt. Nun stehen verschiedene Konfigurationen des Roboters mit einer unterschiedlichen Anzahl von Freiheitsgraden zur Verfügung. Jede Konfiguration hat auch eine unterschiedliche Art von Handgelenk und Arm. Alle Modelle sind über Robot Operating System ROS steuerbar.
Ansprechpartner:
Kunststoff Cyclo-Getriebe
Am IGMR entwickeln wir performante Kunststoff-Getriebe für den Einsatz in Robotern.

In Zusammenarbeit mit der BAM GmbH arbeiten wir im Rahmen eines ZIM Projekts an der Realisierung und Optimierung eines Cyclo-Getriebes aus Kunststoff. Herausforderungen sind die schlechten Fertigungsgenauigkeiten in der additiven Fertigung und das daraus resultierenden Umkehrspiels und die Drehmomentschwankungen im Getriebe.
Mit einem am IGMR entwickelten Prüfstand sind wir in der Lage die Performance zu analysieren und kontinuierlich zu verbessern. Die Getriebe werden in Zusammenarbeit mit der TU München in einem modularen Robotersystem eingesetzt.
Ansprechpartner:
IGOR – Konzept eines hauseigenen 6-Achs-Roboters
Am IGMR haben wir einen hauseigenen Roboter entworfen, der uns in Zukunft bei virtuellen Darstellungen und Simulationen für Anträge und Forschungsprojekte unterstützen soll.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
Entwicklung, Konstruktion und Anwendung von Prüfständen am IGMR


Das IGMR betreibt seit vielen Jahren eine eigene mechanische Werkstatt zur Fertigung von Prototypen im Bereich von Forschungs- und Entwicklungsprojekten sowie der Lehre.
Zu den Stärken des Teams zählen, die jahrelange Erfahrung der qualifizierten Mitarbeiter im Bereich der Prototypenfertigung und Montage von Baugruppen sowie die anschließende finale Installation und Inbetriebnahme der Versuchseinrichtungen und Prüfstände.
Zudem findet am IGMR innerhalb des Teams eine stetige Kommunikation zwischen der Entwicklung, Konstruktion und Produktion sowie der Integration von Elektro-, Mess- und steuerungstechnischen Komponenten statt. In der Herstellung von robotischen Systemen, Handhabungsgeräten und Bewegungsgeinrichtungen ist eine hochgenaue Fertigung, iterative Arbeitsweise und fachübergreifende Kommunikation von großer Bedeutung. Die Komponenten müssen präzise aufeinander abgestimmt werden und unterliegen einer ständigen Überprüfung innerhalb des Produktentwicklungsprozesses. Neben den herkömmlichen Zerspanungsverfahren wird in unserer Werkstatt das Verfahren des 3D-Drucks (additive Fertigung) angewendet, um je nach Anwendungsfall und Ausführbarkeit ein erstes Funktionsmuster schnell und kostengünstig zu erstellen. Die Anwendung von CAD-Systemen im Bereich der Fertigung ist selbstverständlich.
Fertigungsverfahren:
• Drehen
• Fräsen
• Bohren
• Sägen
• Sandstrahlen
• Schweißen (Elektrode)
• 3D-Druck
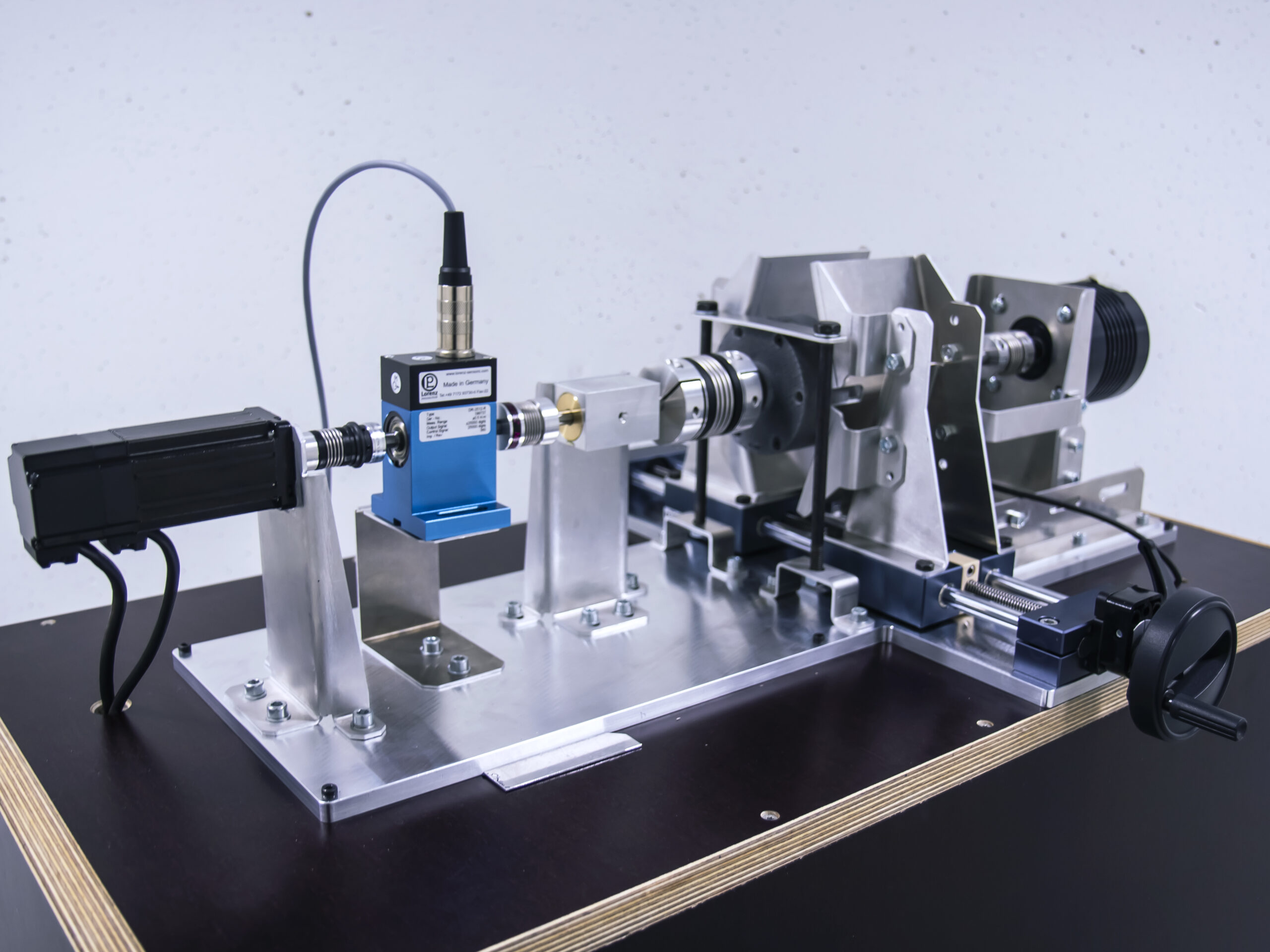
Ein Beispiel der vielfältigen Fertigungsmöglichkeiten der mechanischen Werkstatt in Kombination mit den messtechnischen Kompetenzen des IGMR zeigt die Entwicklung, Konstruktion und Anwendung eines Prüfstands zur Ermittlung der ertragbaren Lastzyklen filigraner, hochgenauer stoffschlüssiger Gelenke.
Im Rahmen des DFG-Projektes „Grundlegende Untersuchung zu stoffschlüssigen
Gelenken mit Einsatz in hochgenauen parallelkinematischen Mikromanipulatoren“ wurde ein Prüfstand zur Ermittlung der ertragbaren Lastzyklen filigraner Kerbgelenke gebaut und Lebensdaueruntersuchung durchgeführt.
Hierbei wurde die Lebensdauer stoffschlüssiger Gelenke untersucht, da diese zwar in der Feinwerktechnik weit verbreitet , aber kaum experimentellen Untersuchungen zur Lebensdauer dieser Gelenke vorhanden sind.
Der Aufbau des Prüfstandes wird in folgendem Video präsentiert:
https://youtu.be/j4ZF_1qZSUk
Besondere Herausforderung bei der Prüfstandsentwicklung waren das reproduzierbare Einsetzen der filigranen Strukturen / stoffschlüssigen Gelenke, die eindeutige Detektion der Gelenkermüdung und die automatisierte Erfassung der Messergebnisse sowie die Berücksichtigung der hohen Lastzyklen aufgrund des Dauerbetriebs.
Links:
Technikum, Labore und mechanische Werkstatt am IGMR
Veröffentlichung zum Prüfstand
Ansprechpartner:


