

Kategorie: ‘ROS’
Participation at European Robotics Forum (ERF) Hackathon 2022

As part of the European Robotics Forum (ERF) Hackathon 2022, six IGMR students demonstrated their talent in prototyping and working with robots. The hackathon challenge was set by Lely, among others. Their ‘Juno‘ mobile robots are autonomous cylindrical platforms whose main task is to move the fencing around cows on farms to make the feed pushed into the space accessible again. The hackathon task was similar: two Juno robots had to move along the walls of two interconnected rooms at a given distance. Additional restrictions and challenges were added for extra points. The team was successful at the hackathon in Rotterdam. After a neck-and-neck race, the first place went to TU Delft. At the award ceremony, we were praised as the most cooperative team for our “constant support of other teams in design and 3D printing“. This ‘exemplary behaviour‘ is much appreciated and we look forward to taking part again next year.
Special praise goes to our students Sebastian Polzin, Frederik van Kerkom, Jonas Braun, Oleksander Kutovyi, Ali Berger and Yannik Freischlad for their efforts. We congratulate TU Delft on their well-deserved victory and are happy to have won many new friends and valuable contacts. We thank the institute management for the opportunity to participate and look forward to next year.
Contact:
Integrated AI task planning and screw recognition in a production scenario

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
The video is also available on our YouTube channel.
Contact:
Daniel Gossen
Frohe Weihnachten und frohes neues Jahr!


Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Wir wünschen euch eine schöne Weihnachtszeit und einen guten Rutsch ins neue Jahr! Bleibt gesund 💙 #merrychristmas #happynewyear
Ansprechpartner:
AI task planning in the EU project Sharework
Automated task scheduling used in the EU-Projekt Sharework.
A new IGMR blog entry has been published on the website of the EU-Projekt Sharework. It presents the challenges of task planning for mixed teams of humans and robots, as well as our solution to them. Automated task planning and a modified version of the framework ROSPlan are used for this purpose. You can find more detail in the text and in the linked video of the blog post.
Sharework-Blog:
https://sharework-project.eu/task-planning-coordinates-the-actions-of-mobile-manipulators-such-as-humans-and-robots/
Contact person:
Prof. Mathias Hüsing
AI task scheduling explained
Artificial Intelligence task scheduling explained using an industry scenario.
https://youtu.be/qNDgJc1XUPM
The Automated Task Planning is intended to support the use of robots in flexible environments.
Traditional robot programming as a sub-area of work preparation processes poses great challenges to individual productions with small quantities. Automated Task Planning promises to address the problems.
In the video, in addition to the introduction and classification of Automated Task Planning, the steps required for its implementation and the benefits that result from its use are presented.
The concept was validated during research at IGMR using a simulation, which is used in the examples in the video.
Contact person:
ReConBot – Ein rekonfigurierbarer Roboter
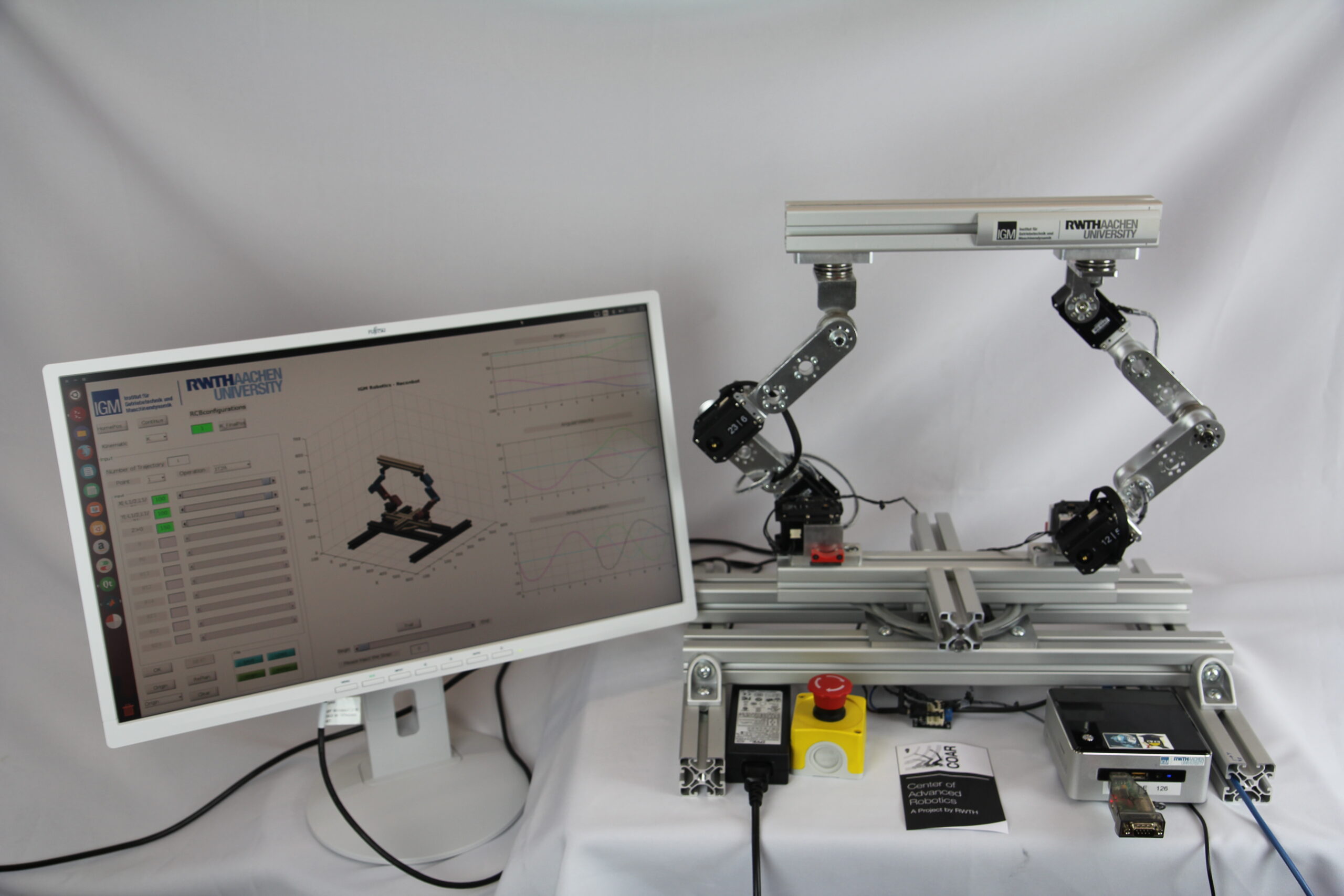
Durch die gezielte Beeinflussung der Roboterstruktur in Form von zusätzlichen Gelenken, können rekonfigurierbare Roboter synthetisiert werden. Diese zeichnen sich über zusätzliche innere Freiheitsgrade aus, welche eine innere Beweglichkeit des Roboters erlauben, ohne eine Posenänderung des Endeffektors zu bewirken. Dies wird häufig bei seriellen Strukturen zur Vermeidung von Kollisionen eingesetzt, wobei sich aber auch parallele Strukturen mit geschlossenen kinematischen Ketten dazu eignen. Am IGMR wurde der ReConBot als parallele Struktur entwickelt, welche durch die kinematische Redundanz auch für einen Strukturwechsel geeignet ist. So ist es möglich unterschiedlichste Konfigurationsräume miteinander zu verbinden und auch die Struktur von einem Vierglied oder Fünfglied zu realisieren, indem sonst aktuierte Gelenke antriebslos geschaltet werden. Der ReConBot zielt auf den hochflexiblen Einsatz in den anspruchsvollen Szenarien des Katastrophenschutz ab.
Ansprechpartner:
IGMR Seminar 08.02.2021 14:30 Uhr: Dr. Stefan Kurtenbach, Trapo AG

Wir begrüßen Dr. Stefan Kurtenbach von der Trapo AG zum IGMR Seminar. Auch diese Veranstaltung wird weiterhin virtuell durchgeführt:
Der Vortrag von Dr. Kurtenbach wird einen Eindruck der aktuellen Entwicklungen und Produkte von der Trapo AG geben.
Trapo Research and Development: Mobile Robotics
Montag, 08. Februar 2021 14:30 Uhr
Zoom Meeting Informationen:
https://rwth.zoom.us/j/98454895570?pwd=NkpiSWkyaTJtdWlralJrSUtnMDdDZz09
Meeting-ID: 984 5489 5570
Kenncode: 186393
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
Die Veranstaltungen im Wintersemester 2020/2021 werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
Weitere Informationen zum Thema können den folgenden Blogeinträgen entnommen werden:
Industrieprojekt Trapo Loading System
Ansprechpartner:
IGMR Seminar: Dr. Michael Cashmore – Plan-Based Robot Control in Real-Time

Mit dem Vortrag von Dr. Miachel Cashmore von der University of Strathclyde startet die virtuelle IGMR Vortragsreihe im Wintersemester 20/21. Wir freuen uns auf einen Einblick in ROSPlan und Plan-Based Robot Control in Real-Time.
Mittwoch, 2. Dezember 2020 16:30 Uhr in Zoom Zoom Meeting Informationen: https://rwth.zoom.us/j/98454895570?pwd=NkpiSWkyaTJtdWlralJrSUtnMDdDZz09 Meeting-ID: 984 5489 5570, Kenncode: 186393
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
The topic of the seminar will focus on the numerous temporal and numeric challenges that arise in plan execution. If a plan is produced with some flexibility, how it can be executed? In this context the properties of temporal controllability, robustness envelopes, replanning in-situ, and planning concurrently to execution, deliberation in a system of distributed components, in which your actions can affect other parts of a larger system will be discussed.
Die Veranstaltungen im Wintersemester 2020/2021 werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
Robot Companion: A mobile helper in case of need
Robot Companion is a framework to implement robot tracking systems in a simple and cost-saving way. For this purpose, IGMR develops methods for tracking with different sensors (laser, radar, camera), agile path planning and actuation.
The current objective of Robot Companion is to provide a robot for emergency rescue. In doing so, the robot will autonomously follow first responders and enable the transport of materials and equipment, as well as the removal of debris and casualties. A first path to this vision was implemented with the basic module. The basic module has methods for tracking with a camera and laser, and enables autonomous tracking of an operator.
The video shows the tracks of the vertical and horizontal trackers, as well as the state of detection (top right). In a tracking test, 100% accuracy was achieved at low speeds.
https://youtu.be/imU8j2zlQrQ
Project website:
https://www.igmr.rwth-aachen.de/index.php/de/rob/rob-comp
Contact:
Driverless transport systems
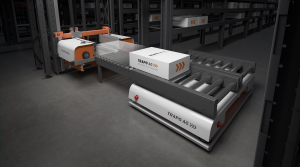
Image source: TRAPO AG
Autonomous transportations systems are being integrated into modern plants and warehouses. Trapo AG has developed with the support of IGMR of RWTH Aachen University a leading product in the industry, the Trapo Transport Shuttle (TTS). The IGMR staff was involved in the development and integration of the localization and navigation algorithms, in the creation of the state machines that determine the behavior of the TTS, and in the intensive testing phases. All methods and algorithms were integrated and configured in the ROS middleware. The whole system has already been successfully put into operation at the customer.
Contact person:
Stefan Bezrucav
Markus Schmitz


