

Kategorie: ‘ROS’
Teilnahme am European Robotics Forum (ERF) Hackathon 2022

Im Rahmen des European Robotics Forum (ERF) Hackathons 2022 haben sechs Studierende des IGMR ihr Talent in Prototyping und dem Umgang mit Robotern unter Beweis gestellt. Die Hackathon Aufgabe wurde unter anderem von dem Unternehmen Lely gestellt. Deren mobile Roboter „Juno“ sind autonom fahrende zylindrische Plattformen, deren Hauptaufgabe darin besteht in Agrarbetrieben die Einzäunung von Kühen abzufahren, um so das in den Raum geschobene Futtermittel wieder erreichbar zu machen. Ähnlich lautete die Aufgabenstellung im Hackathon: Zwei Juno Roboter sollen in zwei miteinander verbundenen Räumen mit einer definierten Distanz die Wände abfahren. Weitere Einschränkungen und Herausforderungen ermöglichten zusätzliche Punkte zu verdienen. Das Team konnte sich erfolgreich beim Hackathon in Rotterdam beweisen. Nach einem knappen Kopf-an-Kopf-Rennen ging der erste Platz an die TU Delft. Bei der Siegerehrung durften wir für unsere „ständige Unterstützung anderer Teams in Konstruktion und 3D Druck“ als kooperativstes Team groß gelobt werden. Dieses „beispielhafte Verhalten“ sei gerne gesehen und wir freuen uns nächstes Jahr wieder dabei zu sein.
Besonderes Lob gilt unseren Studenten Sebastian Polzin, Frederik van Kerkom, Jonas Braun, Oleksander Kutovyi, Ali Berger und Yannik Freischlad für das eingesetzte Engagement. Wir gratulieren der TU Delft zum verdienten Sieg und freuen uns über die vielen neuen Freunde und wertvolle Kontakte, die wir gewinnen konnten. Wir danken der Institutsleitung für die Möglichkeit zur Teilnahme und freuen uns auf nächstes Jahr.
Ansprechpartner:
Integrierte AI-Aufgabenplanung und Schraubenerkennung in einem Fertigungsszenario

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Das Video findet ihr auch auf unserem Youtube-Kanal.
Ansprechpartner:
Daniel Gossen
Frohe Weihnachten und frohes neues Jahr!


Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Wir wünschen euch eine schöne Weihnachtszeit und einen guten Rutsch ins neue Jahr! Bleibt gesund 💙 #merrychristmas #happynewyear
Ansprechpartner:
KI Aufgabenplanung im EU-Projekt Sharework
Die Automatisierte Aufgabenplanung eingesetzt im EU-Projekt Sharework.
Ein neuer IGMR-Blogeintrag wurde auf der Internetseite des EU-Projekts Sharework veröffentlicht. Es werden die Herausförderungen der Aufgabeplanung für gemischte Teams von Menschen und Roboter, sowie unsere Lösung dazu vorgestellt. Automatisierte Aufgabenplanung und eine modifizierte Version des Frameworks ROSPlan werden dafür eingesetzt. Sie finden mehr Detail im Text und im verlinkten Video des Blogposts.
Sharework-Blog:
https://sharework-project.eu/task-planning-coordinates-the-actions-of-mobile-manipulators-such-as-humans-and-robots/
Ansprechpartner:
Prof. Mathias Hüsing
KI Aufgabenplanung erklärt
Die Künstliche Intelligenz Aufgabenplanung erklärt anhand eines Industrie-Szenarios.
https://youtu.be/qNDgJc1XUPM
Die Automatisierte Aufgabenplanung soll den Robotereinsatz in flexiblen Umgebungen unterstützen.
Die traditionelle Roboterprogrammierung als Teilbereich der Arbeitsvorbereitung stellt individuelle Produktionen mit kleinen Stückzahlen vor große Herausforderungen. Die Automatisierte Aufgabenplanung verspricht als Lösungsansatz die Probleme zu beheben.
Im Video wird neben der Einführung und Einordnung der Automatisierten Aufgabenplanung dargestellt, welche Schritte zur Implementierung notwendig sind und welche Vorteile durch ihren Einsatz entstehen.
Das Konzept wurde im Rahmen der Forschung am IGMR anhand einer Simulation validiert, die in den Beispielen des Videos verwendet wird.
Ansprechpartner:
ReConBot – Ein rekonfigurierbarer Roboter
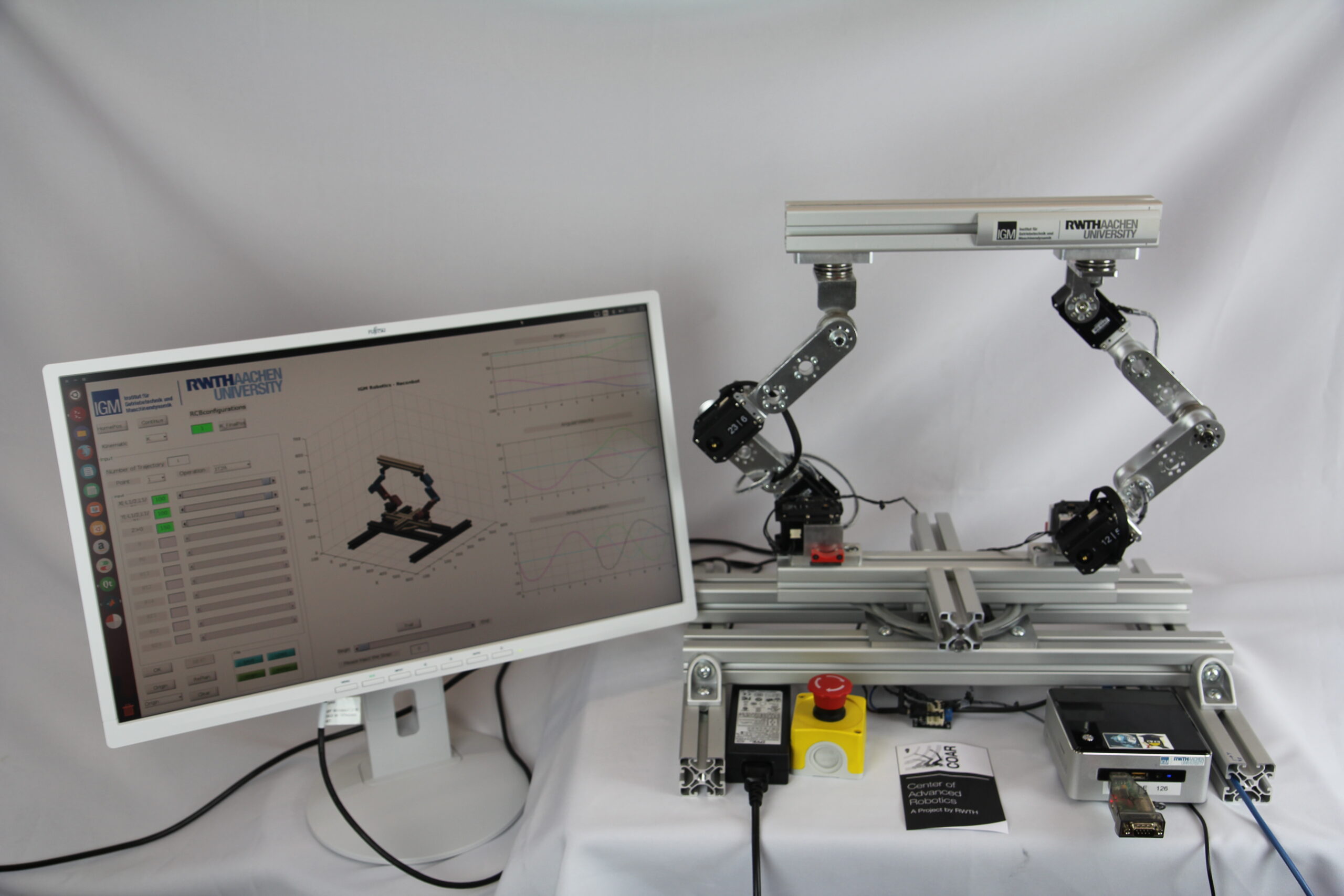
Durch die gezielte Beeinflussung der Roboterstruktur in Form von zusätzlichen Gelenken, können rekonfigurierbare Roboter synthetisiert werden. Diese zeichnen sich über zusätzliche innere Freiheitsgrade aus, welche eine innere Beweglichkeit des Roboters erlauben, ohne eine Posenänderung des Endeffektors zu bewirken. Dies wird häufig bei seriellen Strukturen zur Vermeidung von Kollisionen eingesetzt, wobei sich aber auch parallele Strukturen mit geschlossenen kinematischen Ketten dazu eignen. Am IGMR wurde der ReConBot als parallele Struktur entwickelt, welche durch die kinematische Redundanz auch für einen Strukturwechsel geeignet ist. So ist es möglich unterschiedlichste Konfigurationsräume miteinander zu verbinden und auch die Struktur von einem Vierglied oder Fünfglied zu realisieren, indem sonst aktuierte Gelenke antriebslos geschaltet werden. Der ReConBot zielt auf den hochflexiblen Einsatz in den anspruchsvollen Szenarien des Katastrophenschutz ab.
Ansprechpartner:
IGMR Seminar 08.02.2021 14:30 Uhr: Dr. Stefan Kurtenbach, Trapo AG

Wir begrüßen Dr. Stefan Kurtenbach von der Trapo AG zum IGMR Seminar. Auch diese Veranstaltung wird weiterhin virtuell durchgeführt:
Der Vortrag von Dr. Kurtenbach wird einen Eindruck der aktuellen Entwicklungen und Produkte von der Trapo AG geben.
Trapo Research and Development: Mobile Robotics
Montag, 08. Februar 2021 14:30 Uhr
Zoom Meeting Informationen:
https://rwth.zoom.us/j/98454895570?pwd=NkpiSWkyaTJtdWlralJrSUtnMDdDZz09
Meeting-ID: 984 5489 5570
Kenncode: 186393
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
Die Veranstaltungen im Wintersemester 2020/2021 werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
Weitere Informationen zum Thema können den folgenden Blogeinträgen entnommen werden:
Industrieprojekt Trapo Loading System
Ansprechpartner:
IGMR Seminar: Dr. Michael Cashmore – Plan-Based Robot Control in Real-Time

Mit dem Vortrag von Dr. Miachel Cashmore von der University of Strathclyde startet die virtuelle IGMR Vortragsreihe im Wintersemester 20/21. Wir freuen uns auf einen Einblick in ROSPlan und Plan-Based Robot Control in Real-Time.
Mittwoch, 2. Dezember 2020 16:30 Uhr in Zoom Zoom Meeting Informationen: https://rwth.zoom.us/j/98454895570?pwd=NkpiSWkyaTJtdWlralJrSUtnMDdDZz09 Meeting-ID: 984 5489 5570, Kenncode: 186393
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
The topic of the seminar will focus on the numerous temporal and numeric challenges that arise in plan execution. If a plan is produced with some flexibility, how it can be executed? In this context the properties of temporal controllability, robustness envelopes, replanning in-situ, and planning concurrently to execution, deliberation in a system of distributed components, in which your actions can affect other parts of a larger system will be discussed.
Die Veranstaltungen im Wintersemester 2020/2021 werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
Robot Companion: Ein mobiler Helfer in der Not
Robot Companion ist ein Framework, mit dem Roboterverfolgersysteme einfach und kostensparend umgesetzt werden können. Dazu entwickelt das IGMR Methoden zum Tracking mit unterschiedlicher Sensorik (Laser, Radar, Kamera), agiler Pfadplanung und Ansteuerung.
Das aktuelle Anwendungsziel von Robot Companion ist es, einen Roboter für Notretter bereitzustellen. Dabei folgt der Roboter den Einsatzkräften autonom und ermöglicht den Transport von Material und Ausrüstung, sowie den Abtransport von Schutt und Verunglückten. Ein erster Weg zu dieser Vision wurde mit dem Grundmodul umgesetzt. Das Grundmodul verfügt über Methoden zum Tracking mit Kamera und Laser und ermöglicht die autonome Verfolgung eines Operators.
Im Video zu erkennen sind die Tracks des vertikalen und horizontalen Trackers, sowie der Zustand der Detektion (oben rechts). In einem Verfolgungstest konnte eine Genauigkeit von 100% bei niedrigen Geschwindigkeiten erreicht werden.
https://youtu.be/imU8j2zlQrQ
Projektseite:
https://www.igmr.rwth-aachen.de/index.php/de/rob/rob-comp
Ansprechpartner:
Fahrerlose Transportsysteme
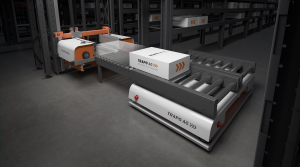
Bildquelle: TRAPO AG
Fahrerlose Transportsysteme werden immer häufiger in modernen Anlagen und Lager integriert. Trapo AG hat ein führendes Produkt in der Branche, der Trapo Transport Shuttle (TTS), mit der Unterstützung vom IGMR der RWTH Aachen entwickelt. Die Mitarbeiter des IGMR waren bei der Entwicklung und Integration von den Lokalisierung- und Navigationsalgorithmen, bei der Erstellung der Zustandsmaschinen, durch welchen das Verhalten vom TTS bestimmt ist, und bei den intensiven Testphasen involviert. Alle Methoden und Algorithmen wurden in der ROS Umgebung integriert und konfiguriert. Das ganze System wurde schon erfolgreich beim Kunde im Betrieb genommen.
Ansprechpartner:
Stefan Bezrucav
Markus Schmitz


