

Schlagwort: ‘Kollaboration’
IIDEA at the daaap annual meeting 2025 in Koblenz

In March, we were able to take part in this year’s annual meeting at the Rhein-Mosel-Werkstätten in Koblenz as an exhibitor and network member of daaap.
A special highlight: The event was opened by Ms Schall, Minister for Labour, Social Affairs, Transformation and Digitization in Rhineland-Palatinate, among others. She took the time to get to know the IIDEA project and was even able to try out our model workplace for herself.
We are delighted with the interest shown in our project by the participating workshops. The direct exchange, valuable discussions and new contacts show that The vision of inclusive digitalization is shared and carried forward.
Contact person:
Mathias Hüsing
IIDEA CoBot

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
In this video, Prof. Mathias Hüsing of the Institute of Mechanism Theory, Machine Dynamics and Robotics at RWTH Aachen University explains simple teaching options for collaborative robots, or CoBots for short, to support disabled and limited persons at work in the context of human-robot collaboration.
Robotics enables inclusion.
More Information about the IIDEA Project can be found at the project website
Robot Cooking – Transferring observations into a planning language
Transferring observations into a planning language: An automated approach in the field of cooking
In the Robot Cooking project, an automated method is developed to analyze and identify motion data and convert it into a machine-readable planning language. This is done using a cooking scenario as an example in which the motion data is captured by recording the hand pose of the cook.
The recording is done using a motion capture system consisting of seven cameras and a glove with three markers on the back of the chef’s hand. The position of the markers is determined by triangulation. This provides enough information to derive the hand pose. The recording is done at 120 frames per second. Before the cooking process, all objects in the workspace are identified and their initial positions determined. Motion data is continuously recorded and converted into poses with time stamps. Additional information such as velocity, acceleration and angle in relation to the tabletop are derived from the raw data.
A initial structure of the dataset is created by finding the side actions using classification. Here, pick, move and place are identified as recurrent side actions. A separate training dataset is used to train a classifier that recognizes these actions. This enables an easier analysis of the remaining actions.
Clustering is applied to identify unknown actions. A dynamic approach allows analysis despite high variability in execution. A unique fingerprint for each action is found, based on the orientation of the back of the hand and its speed on the table plane, to assign each frame to a cluster and finally to an action.
The knowledge gained from classification and clustering is translated into a machine-readable Planning Domain Definition Language (PDDL). A schedule is created, with known actions directly assigned. Start and end positions are specified, and virtual object tracking is used to represent the progression of objects during cooking. For unknown actions, preconditions and effects are handled dynamically. The results are translated into a machine-readable PDDL. This formal representation enables efficient automatic scheduling and execution of the previously demonstrated cooking task.
Additional information is available in the video linked above, the poster and the paper.
Contact:
Markus Schmitz
Development of new wrists for the Paragrip
In a joint research project of the IGMR together with the ISF of the RWTH Aachen University, the Multidirectional Additive Manufacturing (MDAM) of metallic components is being researched. In order to optimize the multi-armed. Paragrip robot for this application, student Raphael Hoffmann has developed an innovative concept of a new robotic wrist in his bachelor thesis. The concept enables the welding current to be conducted directly through the wristsm without the need for an additional ground cable attached to the print bed. Moreover, the wrists enable form fitting gripping of the print bed with self-centering to minimize positioning inaccuracies.
You can find the video on our YouTube channel: https://youtu.be/VdT1rjYG4D0
Contact:
Jan Wiartalla
Teilnahme am A+A Kongress in Düsseldorf

Presentation of the Next Generation Workplace and lecture on “HRC as a tool for inclusive workplaces
At the A+A Congress in Düsseldorf, we presented the Next Generation project together with Caritas Wertarbeit Köln. The congress is attended by many interested parties and experts in the field of occupational health and safety and stimulates dialogue with many exciting presentations on current topics in these areas. On both days of the A+A Congress there were many discussions with interested participants. On the final day, Carlo Weidemann also gave a presentation on “Human-Robot Collaboration as an Assistive Medium for Inclusive Workplaces“. In addition to explaining the motivation behind the design of inclusive workplaces, this presentation also covered the inclusion projects that the IGMR is supporting and helping to shape. These are the Next Generation Project and the project with Ford to reorganise a workplace for employees who have undergone a performance change.
Contact
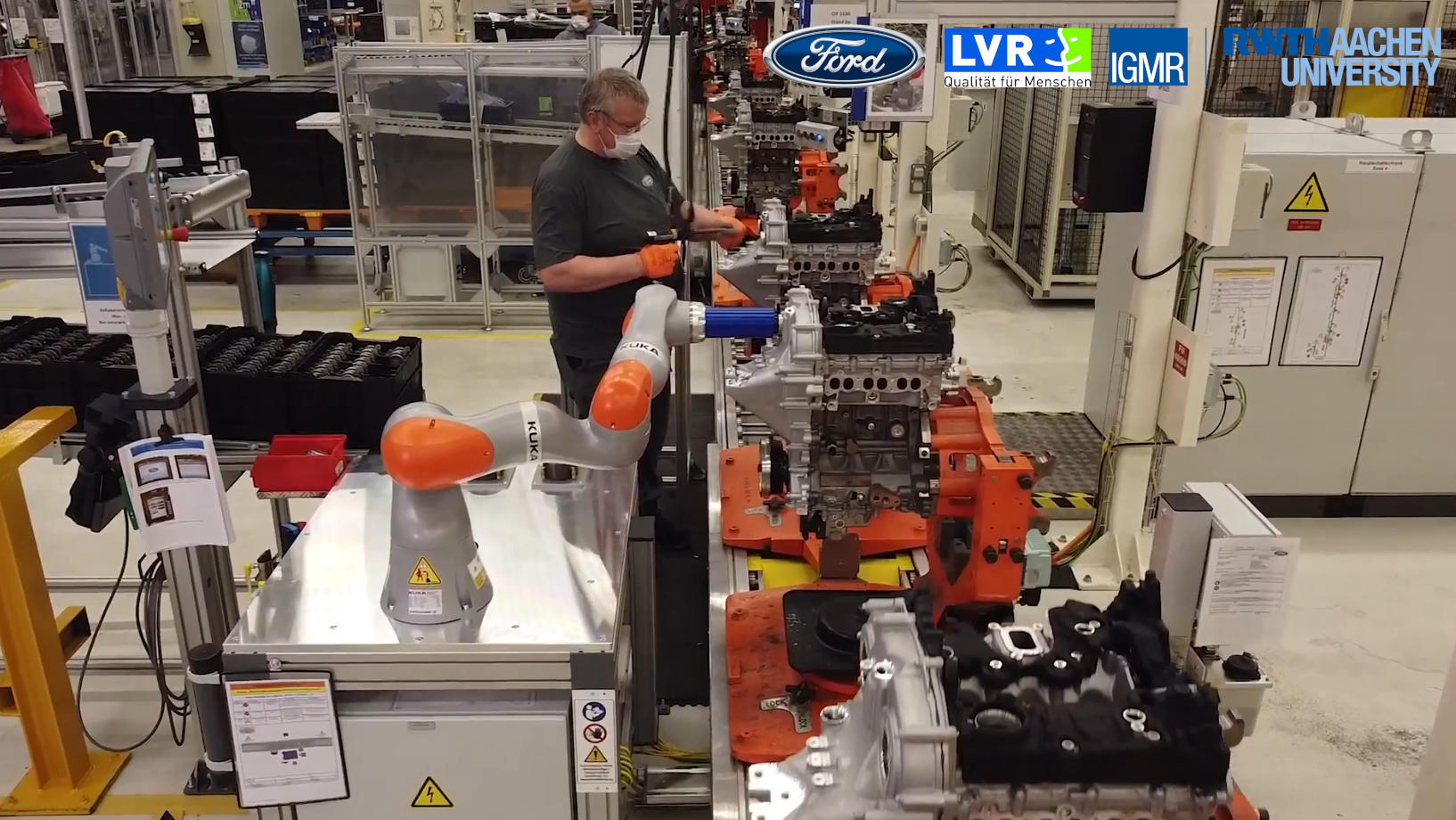
Kollaborierender Roboter bei Ford schafft Jobs für leistungsgewandelte Beschäftige
- Ford richtet mit Hilfe eines kollaborierenden Roboters einen Arbeitsplatz für Beschäftigte mit Schwerbehinderung ein
- Einzigartig ist die enge räumliche Zusammenarbeit zwischen Mensch und Roboter
- Nach ersten Probeläufen reibungslose Zusammenarbeit
- Ford hat zusammen mit der Rheinisch Westfälischen Technischen Hochschule Aachen (RWTH) und dem Landschaftsverband Rheinland (LVR) diesen einmaligen Arbeitsplatz mit einer neuen Version eines kollaborierenden Roboters eingerichtet
AACHEN, 16. August 2021 – Ford hat die Einrichtung eines einzigartigen kollaborierenden Roboters erfolgreich abgeschlossen. Nach rund einem Jahr Forschung, Entwicklung, Mitarbeiterschulung und Trockenläufen arbeitet der so genannte Kobot, ein Wortspiel aus kollaborierend (zusammenarbeitend) und Roboter, nun taktgebunden im Linienfluss im Kölner Motorenwerk des Automobilherstellers. Dort setzt er gemeinsam mit seinem menschlichen Partner VCT-Magnetspulen in einen Öler ein, nimmt die Magnetspulen anschließend auf und presst sie in den Stirndeckel des Motorblocks. Diese Arbeit erfordert große Eindruckkräfte, die selbst für gesunde Arbeitende auf Dauer belastend sein können, und die nun der Kobot für den Menschen übernimmt. Bei den menschlichen Partnern handelt es sich um Beschäftigte mit Schulter- und Handgelenkproblemen. So konnte ein Arbeitsplatz für zwei Beschäftigte mit Schwerbehinderung geschaffen werden.
Ford, die Rheinisch Westfälisch Technische Hochschule in Aachen (RWTH) sowie der Landschaftsverband Rheinland (LVR) forschten rund ein Jahr lang an dieser neuen Einsatzmöglichkeit für einen kollaborierenden Roboter. Das vom LVR mit 372.000 Euro geförderte Modellprojekt hatte das Ziel, den Roboter dergestalt in eine Fertigung einzubauen, dass ein schwerbehinderter Mensch sich einen Arbeitsplatz mit einem Roboter teilt. Das Besondere daran ist die Konfiguration des Roboters, so dass er mit dem Menschen interaktiv „Hand in Hand“ arbeitet und nicht durch eine trennende Schutzeinrichtung, wie z.B. einen Maschinenschutzzaun, getrennt sein muss. Neben der exakten Programmierung des Roboters war auch eine intensive Schulung der Beschäftigten nötig, damit sie einerseits die „Scheu“ vor diesem Kobot ablegen, zum anderen trotzdem noch die nötige Vorsicht walten lassen. Roboter werden seit vielen Jahrzehnten in der Automobilindustrie eingesetzt, allerdings zumeist als überdimensional große Maschinen, die hinter Schutzvorrichtungen arbeiten oder als autonome Fahrroboter, die Materialien transportieren. In diesem Fall bestand die Herausforderung darin, den Arbeitsplatz so zu gestalten, dass sowohl die Voraussetzungen der taktgebundenen Fertigung, die Anforderungen der Arbeitssicherheit als auch die barrierefreie Gestaltung des Arbeitsplatzes berücksichtigt sind.
„Ich bin stolz, dass wir mit diesem Vorzeigeprojekt einen Arbeitsplatz so umgestalten konnten, dass wir ein weiteres Angebot für leistungsgewandelte Beschäftigte haben“, so Dirk Heller, Geschäftsführer Fertigung Ford-Werke GmbH. „Die Akzeptanz unter der Belegschaft ist groß, und besonders die an diesem Arbeitsplatz eingesetzten Mitarbeiter freuen sich auf die neue Aufgabe.“
„Gemeinsam haben wir einen einzigartigen kollaborativen Arbeitsplatz in der Industrie umgesetzt. Ich kenne kaum solch erfolgreich umgesetzte Kollaborationsarbeitsplätze“, erklärt Mathias Hüsing, Professor an der RWTH Aachen. „Warum dieser Mangel? Die menschenzentrierte Arbeitsplatzplanung unter Berücksichtigung von Montageaufgaben, technischen Möglichkeiten und Sicherheitsanforderungen ist (noch) nicht etabliert. Unsere Forschung im Bereich kollaborativer Prozessplanung fokussiert dieses. Inzwischen setzen wir Kollaborationsarbeitsplätze erfolgreich bei anderen Projekten um, wo es darum geht, Arbeitsplätze für Menschen mit Behinderungen auf dem ersten Arbeitsmarkt mit Unterstützung von kollaborierenden Robotern einzurichten.“
„Mit den Mitteln der Ausgleichsabgabe hat das LVR-Inklusionsamt in den letzten Jahren schon auf sehr vielfältige Weise Arbeitsplätze bei Ford umgestalten und sichern können. Das ist eine über die Jahre gewachsene und sehr gute Kooperation zwischen Ford und LVR mit großem Nutzen für die Förderung von Inklusion auf dem Arbeitsmarkt“, ergänzt Christoph Beyer, Leiter des LVR-Inklusionsamtes. „Auch die Erkenntnisse aus dem aktuellen Modellprojekt Kobot helfen uns enorm dabei, die Beschäftigungsmöglichkeit von Menschen mit Behinderung erweitern und neue technische Entwicklungen nutzen zu können. Ford hat hier als großes Unternehmen im Rheinland eine bedeutende Vorbildunktion inne.“
Das Institut für Getriebetechnik, Maschinendynamik und Robotik der RWTH Aachen begleitet das Projekt wissenschaftlich und entwickelt dabei ein Strategiepapier auf Grundlage des im Projekt entstandenen Arbeitsplatzes. Dieses Strategiepapier ist dazu gedacht, die Umsetzung des Arbeitsplatzes für Menschen mit Behinderung im Detail zu beleuchten. In diesem Sinne werden die Veränderungen der Beschäftigungssituation für die Beschäftigten, die Wirtschaftlichkeit der Umsetzung, der Ablauf der Implementierung und die Unterschiede zur Implementierung einer klassischen Industrieroboterzelle sowie die sicherheitstechnischen Herausforderungen dargestellt, analysiert und dokumentiert. So ist gewährleistet, dass zukünftige Projekte von den Erfahrungen und Erkenntnissen aus dem vorliegenden Projekt profitieren.
Das LVR-Inklusionsamt ist zuständig für die Teilhabe schwerbehinderter Menschen auf dem allgemeinen Arbeitsmarkt im Rheinland. Es bietet sowohl für Arbeitgeber als auch für schwerbehinderte Menschen unterschiedliche Unterstützungsangebote an und arbeitet mit verschiedenen Partnern zusammen. Die Angebote umfassen beispielsweise finanzielle Förderung zur Schaffung von Arbeits- und Ausbildungsplätzen, zur behinderungsgerechten Einrichtung von Arbeitsplätzen oder bei außergewöhnlichen Belastungen während der Beschäftigung.
Kontakt
Aufbau der Next Generation Arbeitsplätze

Die Lieferung der Arbeitsplätze ist erfolgt, sodass der Aufbau und die Programmierung beginnen kann.
Kurz vor Weihnachten sind die Arbeitsplätze und das Zubehör beim IGMR der RWTH Aachen angekommen. Somit hat der Aufbau des Arbeitsplatzes begonnen und die Programmierung der Roboter für die Musteranwendungen kann starten.
Dazu sind der KUKA LBR iiwa 7 und der KINOVA JACO2 am Arbeitsplatz befestigt worden und werden für die verschiedenen Greifer (Adaptivgreifer, Parallelgreifer und 2-Finger-Greifer) sowie Bedienelemente konfiguriert. Zusätzlich werden die Roboter für die Musteranwendung der Industrieunternehmen programmiert. Die modulare Programmierung ist dabei essentiell, um die Teilnehmenden entsprechend ihrer Bedürfnisse bestmöglich zu unterstützen.
Im März 2021 werden die Teilnehmenden im Rahmen eines dreitägigen Workshops die Roboter kennenlernen und erproben. Mit den gewonnenen Erkenntnissen aus dem Erstkontakt wird der Arbeitsplatz entsprechend angepasst, damit die Roboter Mitte des Jahres in den Werkstätten der Caritas Wertarbeit Köln zum Einsatz kommen.
Projektseite: https://www.nextgeneration-mrk.de/
Ansprechpartner:
TCP and null space impedance for bypassing objects with the KUKA iiwa
In the video two different types of impedance control of the KUKA iiwa are shown: TCP and null space impedance. Furthermore, the bypassing of objects using impedance control has been implemented.
https://youtu.be/VHrV-nh5oTU
First, the two different types of impedance control are demonstrated. Different stiffnesses can be programmed around the individual TCP axes. Two different stiffnesses within a plane are shown in the video. On the other hand, there is null space impedance. In this case, the robot maintains the pose of the TCP and the elbow can be pushed away. As shown in the video, this can be used to bypass an object while maintaining the programmed TCP path.
Project page: NextGeneration
Contacts:
Teaching the KUKA iiwa by manual guidance
The hand guidance of the collaborative robot KUKA iiwa is well suited for programming spatial points. This is possible both within a program and in the robot’s T1 mode.
https://youtu.be/v7D4yknlxJI
The video shows the manual guidance of the KUKA iiwa within a program. The robot can be guided by hand on the flange when the user presses the gray consent button. After releasing it, the program asks whether the current position is correct and should be saved. Any number of additional positions can then be added. At the end of the program, all stored room points are traversed in the taught sequence.
Contacts:


