
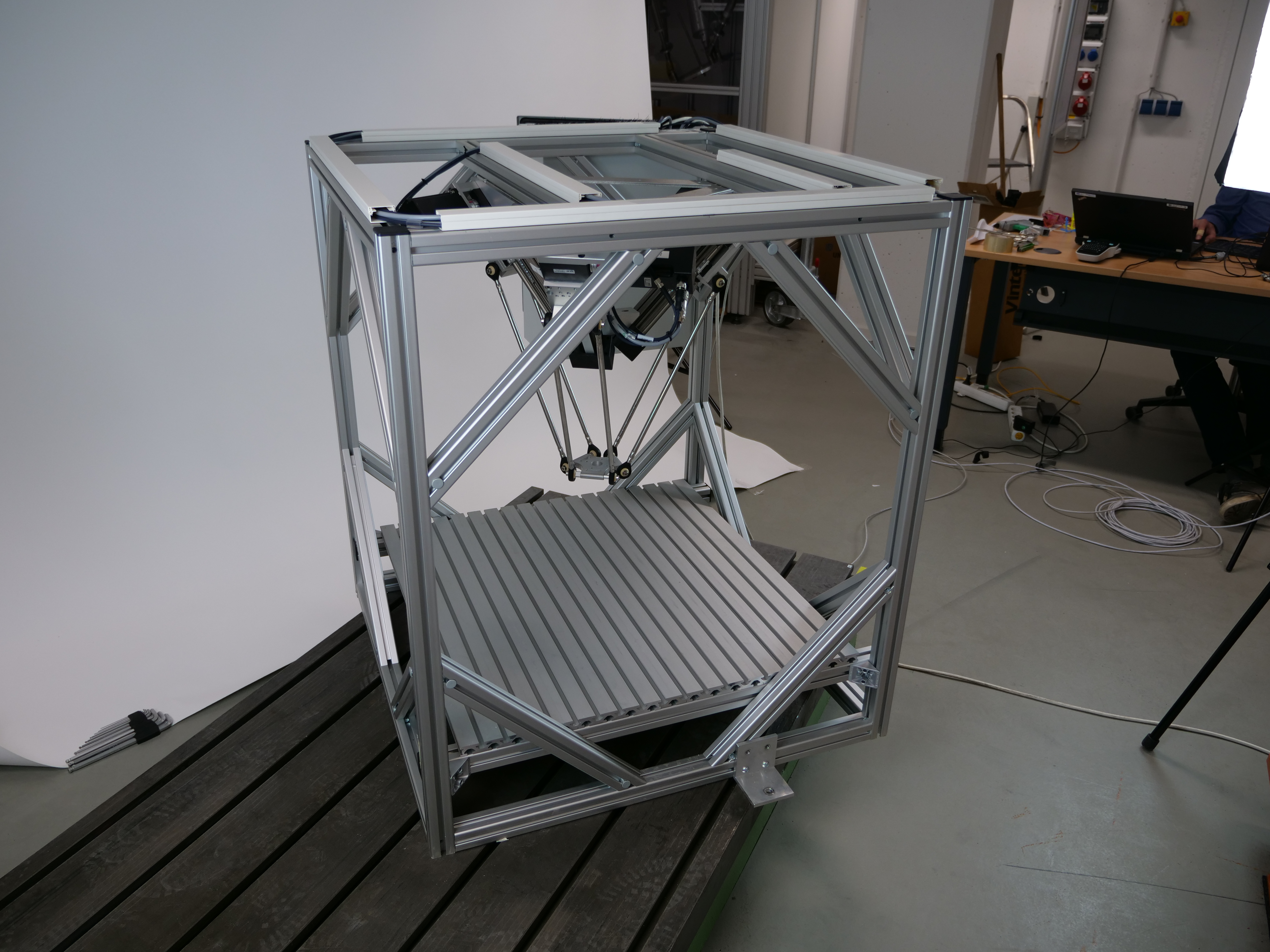
Sebastian Lüke entwickelte in Rahmen seiner Masterarbeit einen Demonstrator inkl. Steuerung, Trajektorienplanung und User Interface für die igus Delta Baukasten.
Ansprechpartner:

Sebastian Lüke entwickelte in Rahmen seiner Masterarbeit einen Demonstrator inkl. Steuerung, Trajektorienplanung und User Interface für die igus Delta Baukasten.
Ansprechpartner:
Kategorie: Allgemein, Arduino, Delta, GUI, Igus, Mensch-Maschine-Kollaboration, Mensch-Roboter-Kollaboration, SmartRobotics, Touch, Touchoberfläche, Trajektorienplanung
Schlagworte: Arduino, Delta, GUI, Igus, Mensch-Maschine-Kollaboration, Mensch-Roboter-Kollaboration, SmartRobotics, Touch, Touchoberfläche, Trajektorienplanung
Optionen: Antworten ist derzeit nicht möglich | Trackback senden «
Die Kommentare sind geschlossen.


