

Schlagwort: ‘Additive Manufacturing’
Additive Fertigung neu gedacht: Von der Simulation zur robotergestützten Umsetzung
Im Projekt FunkDAF arbeiten wir am IGMR gemeinsam mit dem Institut für Maschinenelemente und Systementwicklung (MSE) – RWTH Aachen und dem Visual Computing Institute daran, den gesamten Produktentwicklungsprozess in der additiven Fertigung ganzheitlich abzubilden – von der Bauteilgenerierung bis hin zur finalen Fertigung und Validierung.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Am MSE entstehen mittels Generative Design lastgerechte Bauteile, die durch FEM-Analysen hinsichtlich ihrer Belastung optimiert werden. Aufbauend auf diesen Spannungsdaten entwickelt das VCI druckpfadorientierte Strategien, die sich gezielt an den Hauptspannungsrichtungen orientieren. Dadurch können anisotrope Effekte additiv gefertigter Bauteile reduziert, die Materialausnutzung verbessert und die Bauteilfestigkeit signifikant gesteigert werden.
Am IGMR setzen wir diese innovativen Druckpfade in die Praxis um: Mithilfe eines robotergestützten Setups – bestehend aus einem bewegten Druckbett und einem fixierten Extruder – werden die Pfade zunächst angepasst und anschließend in präzise Robotertrajektorien überführt. Die gefertigten Bauteile werden abschließend mechanisch getestet, um die zugrunde liegenden Hypothesen zu validieren.
Topologisch optimierter flexibler 3D-Gripper

Wie kann man Objekte sicher und gleichzeitig schonend greifen – ganz ohne klassische Gelenke?
Mit diesem 3D-gedruckten Prototypen demonstrieren wir, wie topologische Optimierung und nachgiebige Mechanismen zusammen neue Wege im robotischen Greifen eröffnen.
Das Design basiert auf flexiblen Strukturen, die sich durch gezielte Geometrieanpassung stark deformieren können – ideal, um sich z. B. an kugelförmige Objekte anzupassen.
Ziel:
– Maximierung der Kontaktflächen
– Gleichmäßige Verteilung der Kräfte
– Reduktion von Beschädigungen am Objekt
Dank additiver Fertigung und computergestütztem Design konnten komplexe, leistungsfähige Strukturen umgesetzt werden, die mit herkömmlichen Methoden kaum realisierbar wären.
Ansprechpartnerin:
Estefania Hermoza Llanos
Kick-Off DFG Projekt: Multidirektionale Additive Fertigung
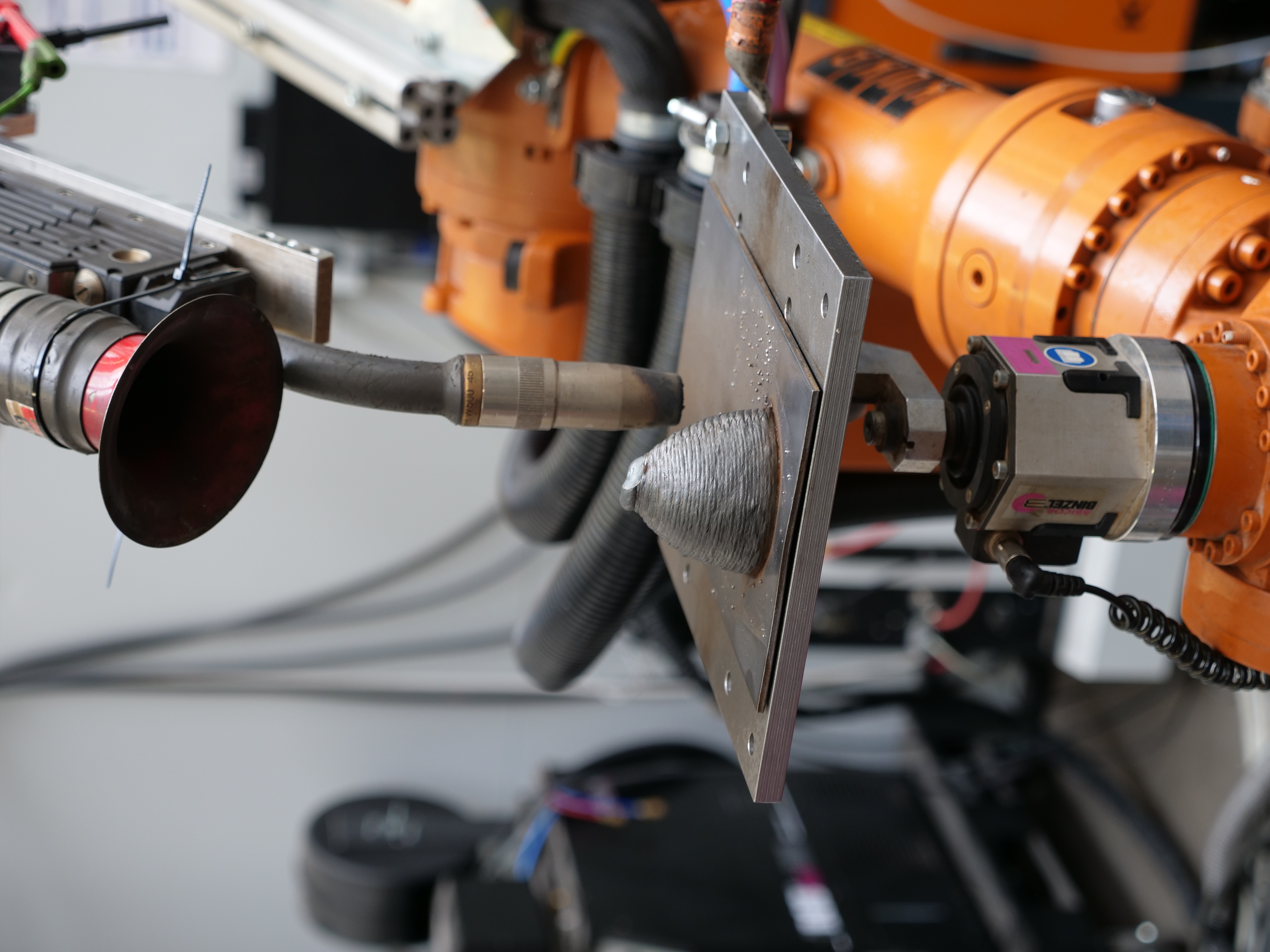
Im neuen DFG-Projekt werden Bauteile mit Robotern im Lichtbogenschweißverfahren Additive gefertigt. Dabei soll die Multidirektionalität ausgenutzt werden.
Ansprechpartner:


