

Schlagwort: ‘Touch’
Igus Delta Demonstrator
26. June 2020 | von Ruland, Stefan Wolfgang
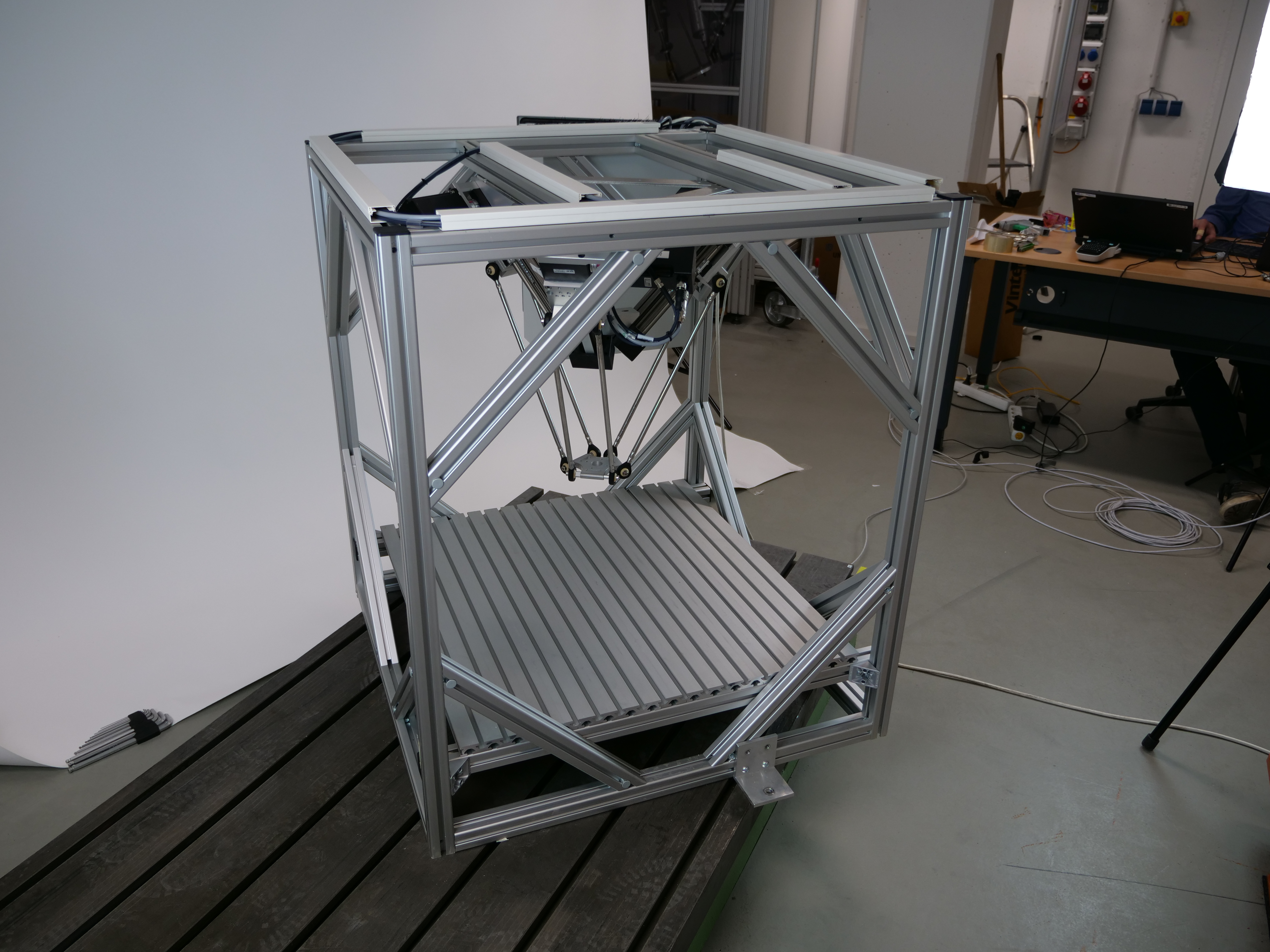
Sebastian Lüke entwickelte in Rahmen seiner Masterarbeit einen Demonstrator inkl. Steuerung, Trajektorienplanung und User Interface für die igus Delta Baukasten.
Ansprechpartner:
Kategorie: Allgemein, Arduino, Delta, GUI, Igus, Mensch-Maschine-Kollaboration, Mensch-Roboter-Kollaboration, SmartRobotics, Touch, Touchoberfläche, Trajektorienplanung
Keine Kommentare »
-
Neueste Beiträge
Neueste Kommentare
Archiv
- Februar 2026
- Dezember 2025
- September 2025
- Juni 2025
- April 2025
- März 2025
- November 2024
- Oktober 2024
- August 2024
- Mai 2024
- April 2024
- Dezember 2023
- November 2023
- Oktober 2023
- August 2023
- Juli 2023
- Juni 2023
- April 2023
- Februar 2023
- Januar 2023
- Dezember 2022
- Oktober 2022
- September 2022
- August 2022
- Juli 2022
- Juni 2022
- Mai 2022
- April 2022
- März 2022
- Januar 2022
- Dezember 2021
- November 2021
- Oktober 2021
- September 2021
- August 2021
- Juli 2021
- Juni 2021
- Mai 2021
- April 2021
- März 2021
- Februar 2021
- Januar 2021
- Dezember 2020
- November 2020
- Oktober 2020
- September 2020
- August 2020
- Juli 2020
- Juni 2020
- April 2020
Kategorien
- 3D-EHLA-Verfahren
- Additive Fertigung
- Additive Manufacturing
- agile Materialentwicklung
- Agricultural
- AI Task Planning
- Algorithmen
- Allgemein
- Arbeitsraumüberwachung
- Arduino
- Aufgabenplanung
- Automated Task Planning
- Bahnplanung
- Bewegungsplanung
- Bewegungsprädiktion
- BMW
- Bots2Rec
- C++
- Caritas Köln
- COAR
- Cobot
- CoppeliaSimEdu
- Data Lake
- Delta
- Design of Experiments
- Deutsches Rettungsrobotikzentrum e.V
- Digital Shadow
- Digitaltag
- dimonta
- DRZ
- edX
- Einsätze
- Entwicklung
- Entwicklung und Konstruktion
- Environment Representation
- Fanuc
- Fanuc Education Cell
- Fanuc Olympiade
- Fertigung
- Feuerwehr
- Fine-Positionierung
- Ford
- Gazebo
- Greiferentwicklung
- GUI
- HandsOnRobotik
- Haptisches Feedbacksystem
- IGMR
- IGMR Seminar
- Igus
- Industrial Robotics
- Industrial Scenario
- Industrie
- Industrie 4.0
- industrielle Robotik
- Inklusion
- inklusive Arbeit
- Inklusive Arbeitsplätze
- Internet of Production
- IoP
- Jahresmagazin Automation
- Kalibrierung
- Katastrophenschutz
- KI
- KI Aufgabenplanung
- KI Objekterkennung
- Kollaboration
- kollaborierenden Roboter
- künstliche Intelligenz
- Lab
- Labor
- Landschaftsverband Rheinland (LVR)
- Laserauftragschweißen
- LaserScan
- Lehre
- Lokalisierung
- Machbarkeitsstudien
- Machine Dynamics
- Maschinen
- Masterarbeit
- Mathworks
- Matlab
- MDAM
- Mensch-Maschine-Kollaboration
- Mensch-Roboter-Kollaboration
- Messtechnik
- Mobile Manipulation
- Mobile Robotics
- Mobile Robotik
- MOOC
- MRK
- MRTeam
- Multibody Dynamics
- Multidirektionale Additive Fertigung
- Navigation
- Next Generation
- Objekterkennung
- OpenCV
- Parameteridentifikation
- PDDL
- Planung
- PLC
- Polizei
- ponticon GmbH
- Prototypen
- Prototypenbau
- Python
- Reasoning
- Regelung
- RePlaLink
- Rettungsrobotik
- Roboguide
- Robot Companion
- Roboter
- Roboter unterstützter Patiententransport
- Roboterprogrammierung
- Robotic Systems
- Robotik
- Robotik in der Pflege
- ROS
- ROSPlan
- Rough Environments
- Schutzeinrichtungen
- Sensor
- Sensornetzwerke
- Sharework
- Simulationen
- SmartRobotics
- Sommerfest
- SPS
- Steuerung
- stoffschlüssige Gelenke
- Synthese
- Task Planning
- Technik
- Technik und Verwaltung
- Technikum
- Touch
- Touchoberfläche
- Tracking
- Trajektorie
- Trajektorieausführung
- Trajektorienplanung
- Trajektorieplanung
- Trapo AG
- Umgebungswahrnehmung
- Umgebungwahrnehmung
- Virtuelle Inbetriebnahme
- Virtuelle Prototypen
- WAAM
- Weihnachten
- Werkstatt
- Zukunft der Arbeit
Meta


