

Kategorie: ‘IGMR’
Robot Companion: Ein mobiler Helfer in der Not
Robot Companion ist ein Framework, mit dem Roboterverfolgersysteme einfach und kostensparend umgesetzt werden können. Dazu entwickelt das IGMR Methoden zum Tracking mit unterschiedlicher Sensorik (Laser, Radar, Kamera), agiler Pfadplanung und Ansteuerung.
Das aktuelle Anwendungsziel von Robot Companion ist es, einen Roboter für Notretter bereitzustellen. Dabei folgt der Roboter den Einsatzkräften autonom und ermöglicht den Transport von Material und Ausrüstung, sowie den Abtransport von Schutt und Verunglückten. Ein erster Weg zu dieser Vision wurde mit dem Grundmodul umgesetzt. Das Grundmodul verfügt über Methoden zum Tracking mit Kamera und Laser und ermöglicht die autonome Verfolgung eines Operators.
Im Video zu erkennen sind die Tracks des vertikalen und horizontalen Trackers, sowie der Zustand der Detektion (oben rechts). In einem Verfolgungstest konnte eine Genauigkeit von 100% bei niedrigen Geschwindigkeiten erreicht werden.
https://youtu.be/imU8j2zlQrQ
Projektseite:
https://www.igmr.rwth-aachen.de/index.php/de/rob/rob-comp
Ansprechpartner:
Next Generation – mit flexiblen Roboterlösungen inklusive Arbeit entwickeln
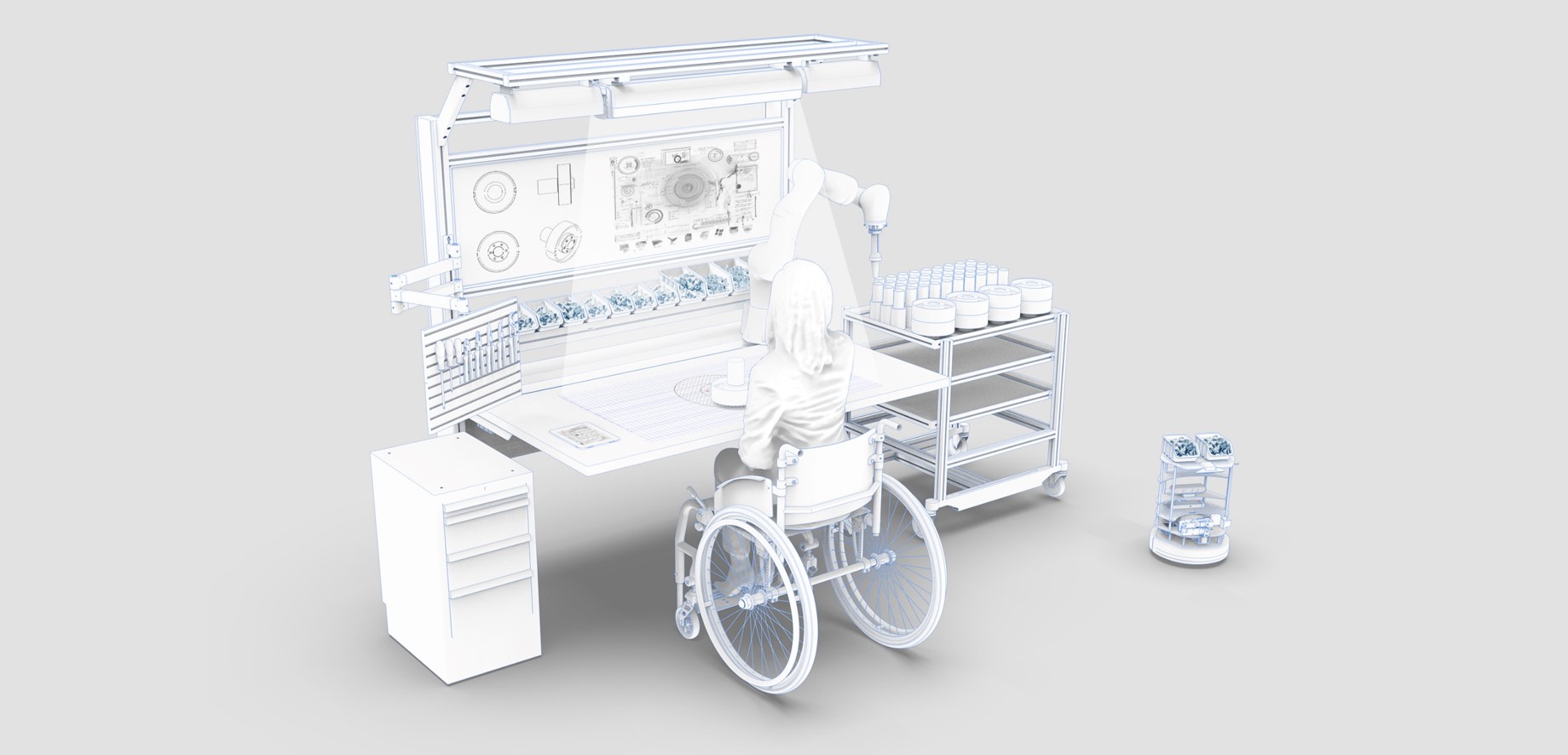
Das Projekt Next Generation verfolgt das Ziel inklusive Arbeitsplätze mithilfe von Mensch-Roboter-Kollaboration (MRK) zu
entwickeln, um Lebensqualität zu steigern.
Menschen mit Schwerst- und Mehrfachbehinderung arbeiten meist unterhalb ihren
persönlichen kognitiven Fähigkeiten. Dies sorgt bei den Betroffenen für große Unzufriedenheit.
Aus diesem Grund gilt es innerhalb des Projekts „Next Generation – mit flexiblen
Roboterlösungen inklusive Arbeit entwickeln“ Arbeitsplätze mithilfe von Mensch-Roboter-
Kollaboration (MRK) zu entwickeln. Das Projekt soll Menschen mit Behinderung ermöglichen, am
Arbeitsleben teilzunehmen. Dies kann sowohl die Lebensqualität steigern als auch
Selbstverwirklichung, Selbstbestimmung und eine positive Persönlichkeitsentwicklung mit sich
führen.
Für Aufgaben aus der Industrie wurden zahlreiche Unternehmen aus dem Großraum Köln
gebeten, mögliche Musteranwendungen für die Konzeption des inklusiven Arbeitsplatzes zur
Verfügung zu stellen. Dabei wurden zwei Tätigkeiten zum einen bei der Buschhoff Stanztechnik
GmbH & Co. KG und zum anderen bei der Cölner Hofbräu P. Josef Früh KG identifiziert. Die
Konzeption und Umsetzung kann nun beginnen. Weitere aktuelle Informationen gibt es auf der
Website des Next Generation-Projektes.
Ansprechpartner:
Kooperative mobile Manipulation in Produktionslinien im „Internet of Production“

Anwendungen der mobilen Manipulation in den Arbeitsumgebungen der „Factory of Future“.
Internet of Production (IoP) hat die Vision, die domänenübergreifende Zusammenarbeit in Produktionslinien auf einer neuen Ebene zu ermöglichen. Die Mobilisierung von Roboter-Agenten und Ressourcen sind die Essenzen der Produktionslinien der Fabrik der Zukunft. Um die Roboteragenten in die Lage zu versetzen, auf die Änderung der Produktionslinien zu reagieren, suchen wir im IGMR nach dynamischer Bewegungsplanung und -steuerung der mobilen Manipulatoren.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Weitere Informationen zum Internet of Production:
https://www.igmr.rwth-aachen.de/index.php/de/rob/rob-iop
https://www.iop.rwth-aachen.de
Ansprechpartner:
Multidirektionale Additive Fertigung im Lichtbogenschweißverfahren

Im Zusammenarbeit mit dem ISF, RWTH Aachen forschen wir am IGMR an der Multidirektionalen Additiven Fertigung. In dieser Anwendung zur Herstellung von Metallbauteilen.
Die Multidirektionale Additive Fertigung ermöglicht sowohl im klassischen FDM-Verfahren mit Kunststoff als auch bei schichtweisen Aufbau im Lichtbogenschweißverfahren die Herstellung von komplexen Bauteilen ohne Stützstrukturen. Am IGMR wird dazu die gesamte Prozesskette der Additiven Fertigung auf die besonderen Herausforderungen dieses Verfahren aus robotischer Sicht erweitert. Dazu gehört die Zerlegung eines virtuellen Bauteils in Schichten (Slicing), die anschließende Planung eines kollisionsfreien Aufbaus, die Generierung von ausführbaren Roboterpfaden zum Ausfüllen der Schichten sowie der notwendigen Trajektorienplanung.
https://youtu.be/vYejNjBSUp8
Ansprechpartner:
Markus Schmitz
Carlo Weidemann
WAAM-Simulation mit ROS in Gazebo
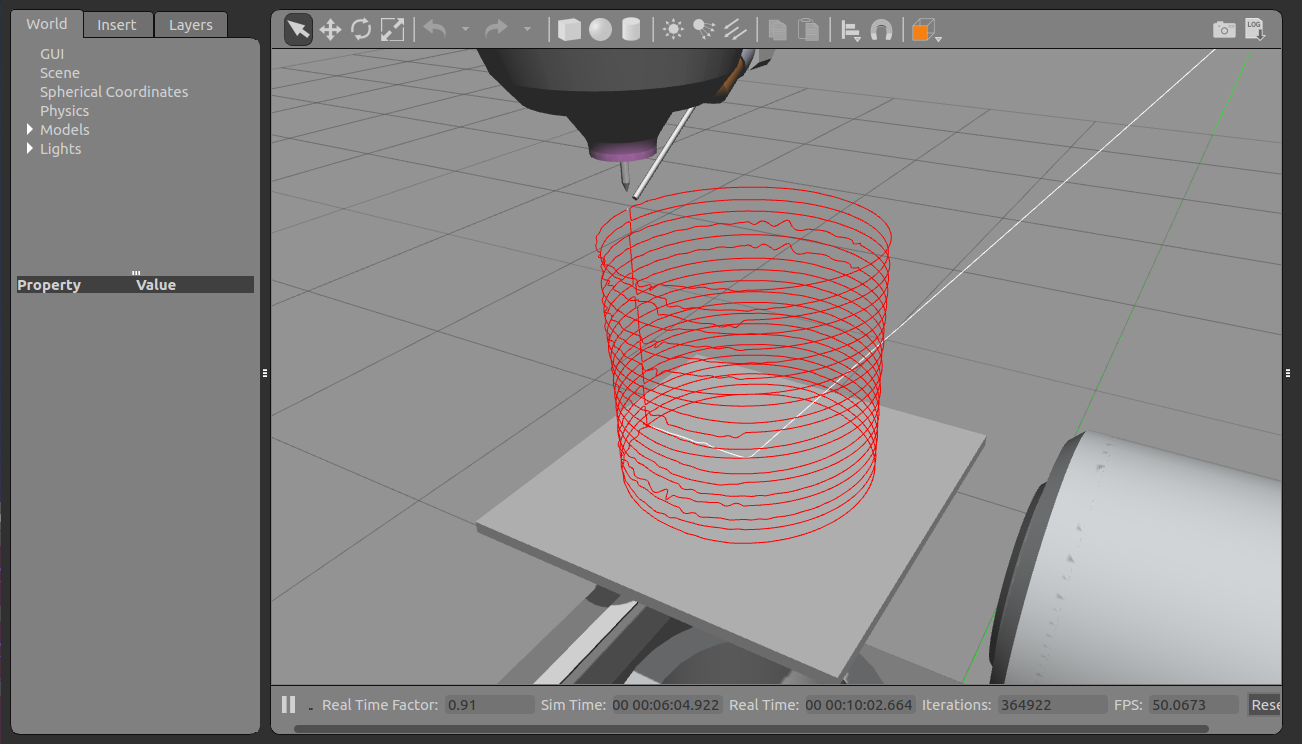
Vincent Brünjes entwarf in seiner Masterarbeit eine Gazebo-Erweiterung, um multidirektionale, additive Wire+Arc-Fertigungsprozesse zu simulieren.
Ansprechpartner:
Aufgabenplanung in industriellen Szenario
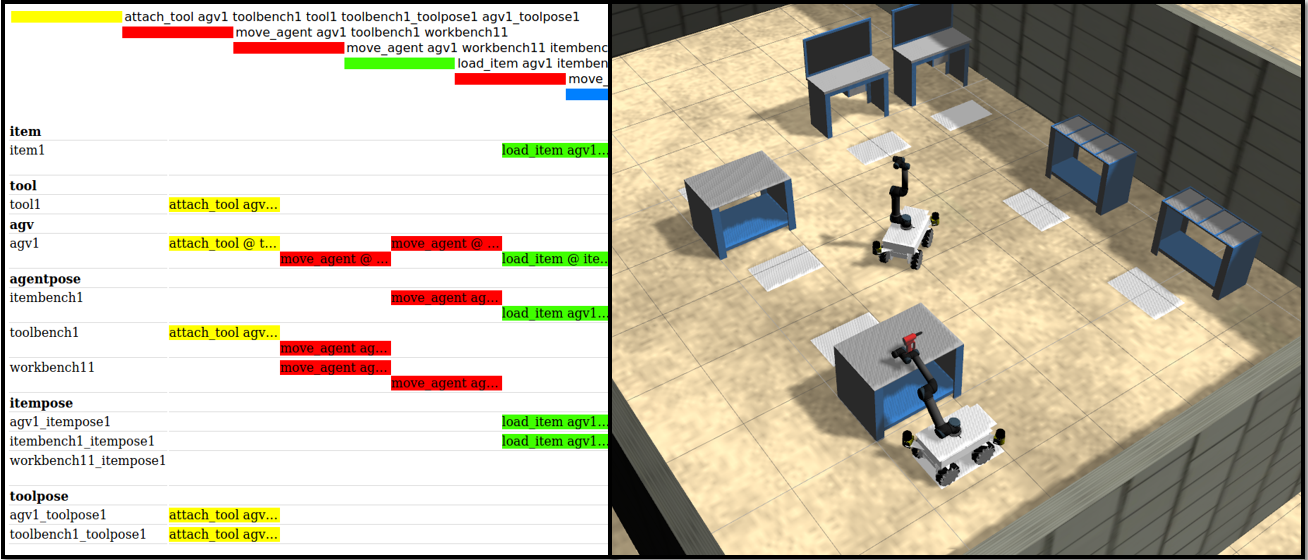
Zur Verbesserung von automatischen Planungsalgorithmen für Szenarien mit kollaborierenden Akteuren kommen PDDL-Modellierung, ROSPlan und Gazebo-Simulationen zum Einsatz.
Ansprechpartner:


