

Kategorie: ‘Industrie 4.0’
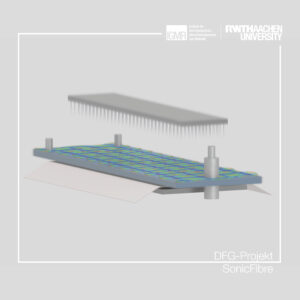
Innovationen in der Textiltechnik: Das DFG-Projekt SonicFibre
Im Rahmen unseres gemeinsamen Projekts am Institut für angewandte Mechanik (IAM) und @Institut für Textiltechnik (ITA) arbeiten wir an einer spannenden Entwicklung: der Herstellung von Vliesstoffen mit optimierter Effizienz.
💡 Die Herausforderung: Beim Vernadeln, einem zentralen Prozessschritt, werden die Fasern durch mechanische Bewegung verschränkt, um aus einem losen Faserbündel ein stabiles Vlies zu erzeugen. Dabei entstehen hohe Reibungskräfte – ein Problem, das zu Verschleiß an den Maschinenteilen führt.
🔊 Unsere Lösung: Durch die gezielte Anregung von hochfrequenten Schwingungen im Ultraschallbereich optimieren wir die Reibung zwischen den Fasern. Unser Fokus liegt darauf, eine perforierte Platte im Ultraschallbereich so zu stimulieren, dass ein geeignetes Schwingungsbild erzeugt wird – und damit den Prozess effizienter und schonender zu gestalten.
Weitere Informationen zum Projekt findet ihr hier.
Ansprechpartner:
Johannes Bolk
Automatisierte robotische Demontage – Schraubenerkennung und -entfernung für das Recycling von EV-Batterien
Vollautomatische Demontage mit Präzision!
Unser neues robotisches System revolutioniert die Demontage von E-Auto-Batterien. Mithilfe des Neura Lara 8 Roboters und modernster Bildverarbeitungstechnologien erkennen wir Schrauben vollautomatisch und positionieren den Roboter präzise, um sie sicher zu entfernen.
Durch die Integration von YOLOv8 und Intel RealSense Tiefenkameras kann das System Schrauben in Echtzeit lokalisieren und selbstständig die optimale Positionierung vornehmen. Kein manuelles Eingreifen nötig – das System arbeitet komplett autonom!
Unser Ziel: Den Recyclingprozess sicherer, schneller und effizienter zu machen. Weniger Risiken für die Arbeiter und gleichzeitig eine Maximierung der Rohstoffrückgewinnung. Das ist die Zukunft der Kreislaufwirtschaft!
Weitere Informationen zu #dimonta findet ihr hier.
Ansprechpartner:
Markus Schmitz
Daniel Gossen
3D Capsule Compliant Grippers
Auf der ASME IDETC-CIE Konferenz in Washington, DC, hatten wir die Gelegenheit, den Prototypen des „3D Capsule Compliant Grippers“ vorzustellen. Dieses neuartige Werkzeug zur chirurgischen Manipulation wurde speziell entwickelt, um die Isolation von Lymphknoten noch präziser und schonender zu gestalten.
Unser Ansatz: eine kapselartige Struktur mit flexiblen, formoptimierten Elementen, die mithilfe eines Hill-Climbing-Mutationsalgorithmus maßgeschneidert wurden. Die weißen „Blütenblätter“ des Prototyps wurden im 3D-Druck aus PLA gefertigt, die roten flexiblen Komponenten aus TPU. Durch die kostengünstige Herstellung an unserem Institut konnten wir eine erste effiziente Lösung im Makromaßstab schaffen, die als Proof of Concept dient.
Ansprechpartner: Estefania Hermoza Llanos
IMBA-Schulung für das IIDEA-Projektteam

Unser IIDEA-Projektteam hat an einer Schulung zur „Integration von Menschen mit Behinderungen in die Arbeitswelt“ (IMBA) teilgenommen.
IMBA ist an der Schnittstelle von medizinischer und beruflicher Rehabilitation positioniert und ermöglicht eine präzise Beschreibung und Vergleich von Arbeitsanforderungen und menschlichen Fähigkeiten. In der Schulung wurden die Grundlagen von IMBA vermittelt, mit einem besonderen Fokus auf den definierten Merkmalen, die als Grundlage für die Bewertung von Arbeitsanforderungen und Fähigkeiten dienen. Ein Höhepunkt der Schulung war die Einführung in die Software „Marie Plus“, die eng mit dem IMBA-Konzept verbunden ist. Die Schulung wurde von Torsten Alles, Ph.D., dem Geschäftsführer des iqpr, durchgeführt. Sein umfassendes Wissen und seine Erfahrung haben dazu beigetragen, die Bedeutung von IMBA in der Arbeitstherapie und der tätigkeitsorientierten medizinischen Rehabilitation zu unterstreichen.
Wir sind überzeugt, dass diese Schulung unsere bisherige Forschung unterstützen wird und einen wertvollen Beitrag zum IIDEA-Projekt leisten wird. Wir sind dankbar für die Expertise, die wir durch diese Schulung gewonnen haben, und freuen uns darauf, die erworbenen Kenntnisse in unserer täglichen Arbeit anzuwenden.
Hier findet ihr weitere Informationen zum IIDEA-Projekt.
Ansprechpartner:
Mathias Hüsing
Carlo Weidemann
Elodie Hüsing
Sophie-Charlotte Keunecke
Christina Jansen
IFToMM D-A-CH in Rostock

Das IGMR war mit einem breitgefächerten Themenspektrum auf der diesjährigen IFToMM DACH in Rostock vertreten!
Wir haben spannende Einblicke in folgende Themen präsentiert:
– Erweiterung des PlanSys2 Frameworks
– Digitale Zwillinge in der intelligenten Fertigung
– Funktionsgetriebene multidirektionale additive Fertigung
– Energieeffiziente ungleichförmig übersetzende Getriebe
– Digitale Lehrangebote in der Maschinendynamik
Neugierig? Der Tagungsband inklusive unserer Beiträge ist hier verfügbar!
Ansprechpartner:
Simon Schläger
Sophie Charlotte Keunecke
Mark Witte
Thomas Knobloch
Nils Brückmann
Ein herzliches Dankeschön an die OrganisatorInnen und alle TeilnehmerInnen für eine großartige Konferenz mit inspirierendem Austausch!
Projektstart IIDEA – Inklusion und Integration durch Cobots auf dem Arbeitsmarkt
Im April wurde das innovative Projekt „IIDEA – Inklusion und Integration durch Cobots auf dem ersten Arbeitsmarkt“ gestartet, das sich zum Ziel gesetzt hat, die Inklusion und Integration von schwerbehinderten Menschen auf dem ersten Arbeitsmarkt durch kollaborative Robotik zu befähigen. Die Verwendung von Cobots ermöglicht es, neue Arbeitsplätze und -formen zu schaffen, die auf die individuellen Bedürfnisse schwerbehinderter Menschen zugeschnitten sind. Diese neuen Arbeitsformen werden nicht am Rande, sondern im Zentrum der Digitalisierung und der Industrie 4.0 etabliert.
In einer sich schnell verändernden Welt ist es wichtig, dass wir uns auf die Bedürfnisse aller Menschen konzentrieren und sicherstellen, dass alle in der Lage sind, ihr volles Potenzial auszuschöpfen. Das Projekt „IIDEA“ ist ein wichtiger Schritt in Richtung einer inklusiven und integrativen Gesellschaft und Wirtschaft.
Weitere Informationen zum Projekt finden Sie auf unserer Website. Wenn Sie weitere Fragen haben, können Sie sich gerne an die folgende E-Mail-Adresse wenden: iidea@igmr.rwth-aachen.de.
Ansprechpartner:
Prof. Mathias Hüsing
Carlo Weidemann
Sophie-Charlotte Keunecke
Elodie Hüsing
Christina Jansen
Querschnittsgruppe: Application Dynamics

Das Team hinter Application Dynamics setzt sich aus allen Forschungsbereichen des IGMR zusammen. Auf diese Weise können die Fähigkeiten auf dem Gebiet der Schwingungsanalyse und Maschinendynamik optimal mit den Kompetenzen und langjährigen Erfahrungen rund um die Themen der Getriebetechnik und Robotik verein werden. Dieser Zusammenschluss Instituts interner Forschungsschwerpunkte, ermöglicht Problemlösungen in denen sowohl fachliche Kompetenzen der Dynamik als auch anwendungsspezifisches Fachwissen gefragt sind. Angewendet wird dieser Wissensquerschnitt beispielsweise in Form einer anforderungsbasierten Untersuchung und Ausnutzung der dynamischen Effekte eines Systems. Der Fokus liegt auf Anwendungen aus dem Bereich der Robotik und Getriebetechnik, erfasst darüber hinaus jedoch jegliche Arten mechanischer Bewegungseinrichtungen. Der aktuelle Forschungshorizont erstreckt sich von kinematischer Redundanz über high Speed Trajektorien bis hin zur Nutzung neuronaler Netze, mit welchen eine Erweiterung des Arbeitsraumes durch innovative Objektmanipulation erreicht wird.
Ansprechpartner: Johannes Bolk
Integrierte AI-Aufgabenplanung und Schraubenerkennung in einem Fertigungsszenario

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Das Video findet ihr auch auf unserem Youtube-Kanal.
Ansprechpartner:
Daniel Gossen
Workshop zu Umweltwahrnehmung in Sharework
Beim Trainings-Workshop „Manufacturing environment perception for an effective human-robot collaboration“ konnten wir unsere Themen in den Bereichen Werkraumüberwachung und Objekterkennung mit einfachen Lernverfahren präsentieren. Der Vortrag umfasst eine kurze theoretische Einführung in das maschinelle Lernen mit Zufallswäldern, präsentiert die Arbeitspakete des IGMR in Sharework und gibt eine paar Tipps für die Verwendung der Methoden in eigenen Projekten. Neben unseren Arbeitspaketen wurden auch die Beiträge der anderen Partner, u.a. auf dem Gebiet der Ontologie und Bewegungsprimitive präsentiert.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
Daniel Gossen


