

Kategorie: ‘Mensch-Maschine-Kollaboration’
Neuer kollaborativer Industrieroboterarm: UR10e
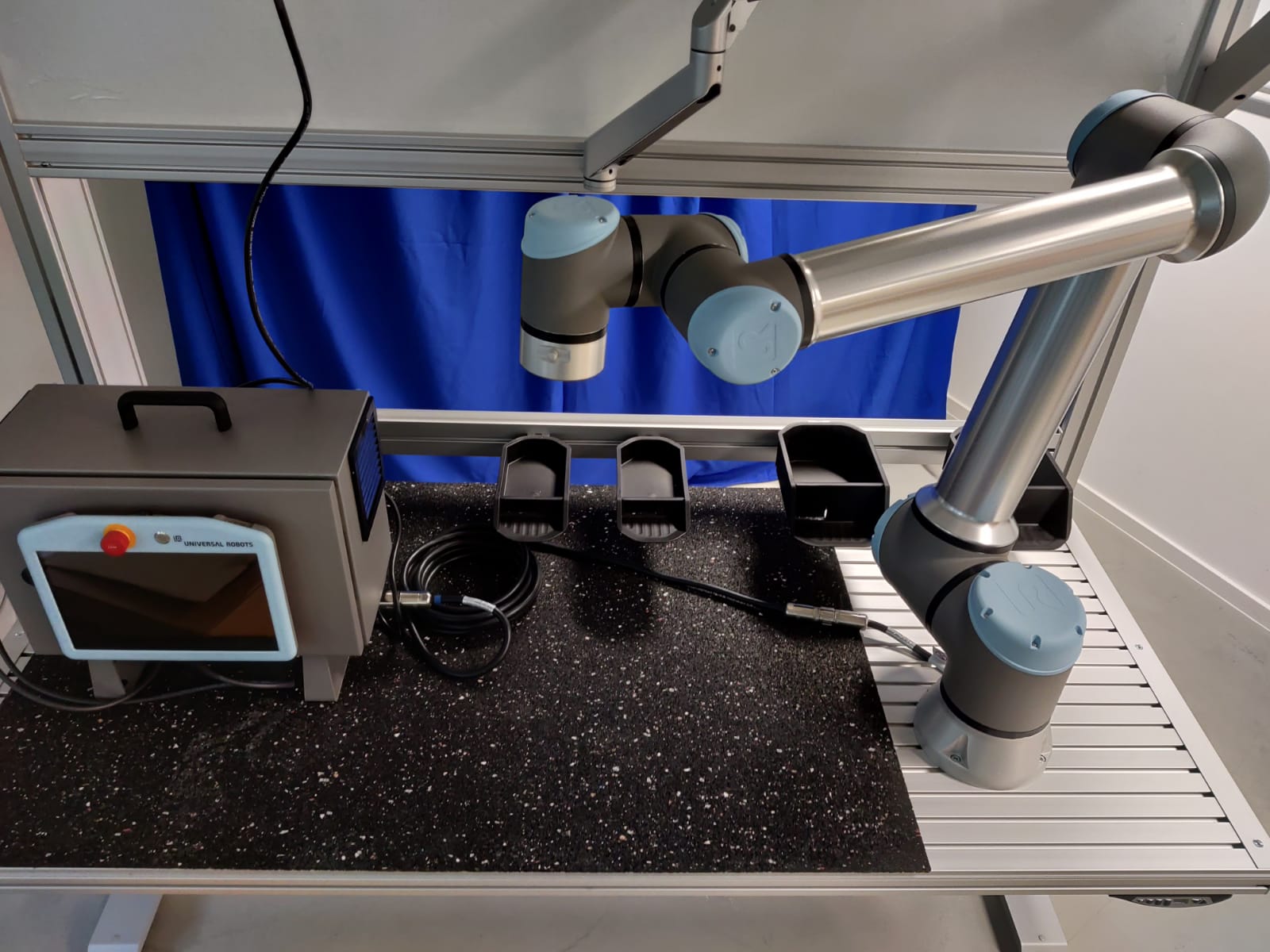
Das IGMR-Kobot-Team vergrößert sich mit der Inbetriebnahme des Universal Robot UR10e.
Das Kobot-Team im Kleinversuchfeld des IGMRs hat durch den Universal Robot UR10e Zuwachs bekommen. Mit einer Reichweite von 1.300 mm und einer Traglast von 10 kg ist er der leistungsstärkste und größte kollaborative Roboter im Team und eignet sich deswegen besonders gut für Pick-and-Place-, Palettierungs-, Verpackungs- und Montageaufgaben. Zudem ist er, einfach zu programmieren und schnell in neuen Anwendungen zu integrieren. Der Roboter wird im Rahmen des Next Generation Projekts eingesetzt und soll hier in Kombination mit einem Bin-Picking-System für das Aufnehmen und Handhaben von ungeordneten Blechbauteilen aus einem Bunker programmiert werden.
Internetseiten:
Ansprechparter:
Kurzfilm zum Projekt Next Generation
Menschen mit einer Schwermehrfachbehinderung in auf dem ersten Arbeitsmarkt integrieren. Ist das überhaupt möglich?
Wie dies mit kollaborativen Robotern möglich wird, zeigt ein Video zum Projekt NextGeneration auf dem Youtube-Kanal der Caritas Köln.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Internetseiten:
Ansprechparter:
Aktive Kollisionsvermeidung in der Mensch-Roboter-Kollaboration
Vor dem Hintergrund der Mensch-Roboter-Kollaboration untersucht das IGMR der RWTH Aachen innovative Ansätze zur sicheren Gestaltung teilautomatisierter Montage- und Produktionsprozesse.
Marktübliche Cobots sind in der Regel mit einer Geschwindigkeits- und Abstandsüberwachung beziehungsweise einer Leistungs- und Kraftbegrenzung nach ISO/TS 15066 ausgestattet. Entsprechende Roboter reagieren demnach im Gefährdungs- oder Kollisionsfall mit einer Reduktion der Prozessgeschwindigkeiten beziehungsweise mit einem Betriebshalt, wodurch industrielle Prozesse im Zweifel nachteilig beeinflusst werden.
Der hier vorgestellte Ansatz zeigt deshalb, wie sich Kollisionen zwischen Mensch und Roboter aktiv vermeiden lassen. Das Verfahren nutzt die kinematische Redundanz des KUKA LBR iiwa, um sensorisch erfassten Hindernissen durch die innere Rekonfiguration der Roboterkinematik auszuweichen. Die Trajektorie des Endeffektors wird dabei nicht verändert, sodass der vorgegebene Prozessablauf erhalten bleibt. In diesem Zusammenhang lassen sich alternative Sicherheitskonzepte entwickeln, die eine kollisionsfreie Automatisierung im Rahmen der Mensch-Roboter-Kollaboration ermöglichen.
Aktive Kollisionsvermeidung mit dem KUKA LBR iiwa – Referenzbewegung ohne Hindernisumfahrung:

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Aktive Kollisionsvermeidung mit dem KUKA LBR iiwa – optimierter Bewegungsverlauf mit Hindernisumfahrung durch kinematische Rekonfiguration:

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
Kamerakalibrierung in SHAREWORK – Teil 2
Im Oktober letzten Jahres haben wir bereits gezeigt, wie sich ein Kameranetzwerk kalibrieren lässt. Mit dem damaligen Kalibrierziel ließ sich bereits eine Kalibriergenauigkeit im Sub-Pixel-Bereich generieren. Auf die hohen Distanzen von ca. 8 Meter und bei einer Auflösung von „nur“ 4MP sind das allerdings immer noch mehrere Millimeter Abweichung in der realen Welt. Für unsere finalen Tests haben wir nochmal in die Trickkiste gegriffen und uns ein größeres Kalibrierziel besorgt. Jetzt ist die Manövrierfähigkeit allerdings nicht mehr so einfach. Wie so ein Kalibriervorgang mit einem über 3qm großen Ziel aussieht, seht ihr im Video.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
IGMR Seminar 11.02.2021 13:00 Uhr: Wameq Kazemi, Freise Automation GmbH

Bildquelle: Freise Automation GmbH
Wir begrüßen Herrn Wameq Kazemi von Freise Automation GmbH zum IGMR Seminar.
Auch diese Veranstaltung wird weiterhin virtuell durchgeführt:
Im Vortrag wird Herr Kazemi die kollaborative Roboterserie HRC von Hanwha vorstellen und außerdem einen Einblick in die Programmierung der HRC Cobots geben.
Agenda:
o Vorstellung Freise Automation
o Vorstellung HRC Series
o Programmieren des HRC

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Zugangsdaten zum Online Meeting:
RWTH – Fresie Automation / Kollaborative Robotik
Do., 11. Feb. 2021 13:00 – 14:00 (CET)
Nehmen Sie an meinem Meeting per Computer, Tablet oder Smartphone teil.
https://global.gotomeeting.com/join/111521101
Sie können sich auch über ein Telefon einwählen.
(Bei Geräten, die diese Funktion unterstützen, ist die sofortige Teilnahme über eine der unten aufgeführten Direktwahlnummern möglich.)
Deutschland: +49 721 6059 6510
– Direktwahl: tel:+4972160596510,,111521101#
Zugangscode: 111-521-101
Sie kennen GoToMeeting noch nicht? Installieren Sie jetzt die App, damit Sie für Ihr erstes Meeting bereit sind: https://global.gotomeeting.com/install/111521101
Die Veranstaltungen im Wintersemester 2020/2021 werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
Ansprechpartner:
Aufbau der Next Generation Arbeitsplätze

Die Lieferung der Arbeitsplätze ist erfolgt, sodass der Aufbau und die Programmierung beginnen kann.
Kurz vor Weihnachten sind die Arbeitsplätze und das Zubehör beim IGMR der RWTH Aachen angekommen. Somit hat der Aufbau des Arbeitsplatzes begonnen und die Programmierung der Roboter für die Musteranwendungen kann starten.
Dazu sind der KUKA LBR iiwa 7 und der KINOVA JACO2 am Arbeitsplatz befestigt worden und werden für die verschiedenen Greifer (Adaptivgreifer, Parallelgreifer und 2-Finger-Greifer) sowie Bedienelemente konfiguriert. Zusätzlich werden die Roboter für die Musteranwendung der Industrieunternehmen programmiert. Die modulare Programmierung ist dabei essentiell, um die Teilnehmenden entsprechend ihrer Bedürfnisse bestmöglich zu unterstützen.
Im März 2021 werden die Teilnehmenden im Rahmen eines dreitägigen Workshops die Roboter kennenlernen und erproben. Mit den gewonnenen Erkenntnissen aus dem Erstkontakt wird der Arbeitsplatz entsprechend angepasst, damit die Roboter Mitte des Jahres in den Werkstätten der Caritas Wertarbeit Köln zum Einsatz kommen.
Projektseite: https://www.nextgeneration-mrk.de/
Ansprechpartner:
TCP- und Nullraum-Impedanz zum Umfahren von Objekten mit dem KUKA iiwa
Im Video werden zwei verschiedene Arten der Impedanz Regelung des KUKA iiwa gezeigt: TCP- und Nullraum-Impedanz. Darüber hinaus ist das Umfahren von Objekten mithilfe der Impedanz-Regelung umgesetzt worden.
https://youtu.be/VHrV-nh5oTU
Als erstes werden die zwei verschiedenen Arten der Impedanz-Regelung demonstriert. Zum einen lassen sich Steifigkeiten um die einzelnen TCP-Achsen programmieren. Im Video werden zwei verschiedene Steifigkeiten innerhalb einer Ebene gezeigt. Zum anderen gibt es die Nullraum-Impedanz. Dabei behält der Roboter die Pose des TCPs bei und der Arm kann weggedrückt werden. Wie im Video gezeigt, lässt sich damit ein Objekt „fühlend“ umfahren, während der programmierte TCP-Pfad eingehalten wird.
Projektseite: NextGeneration
Ansprechpartner:
Next Generation – mit flexiblen Roboterlösungen inklusive Arbeit entwickeln
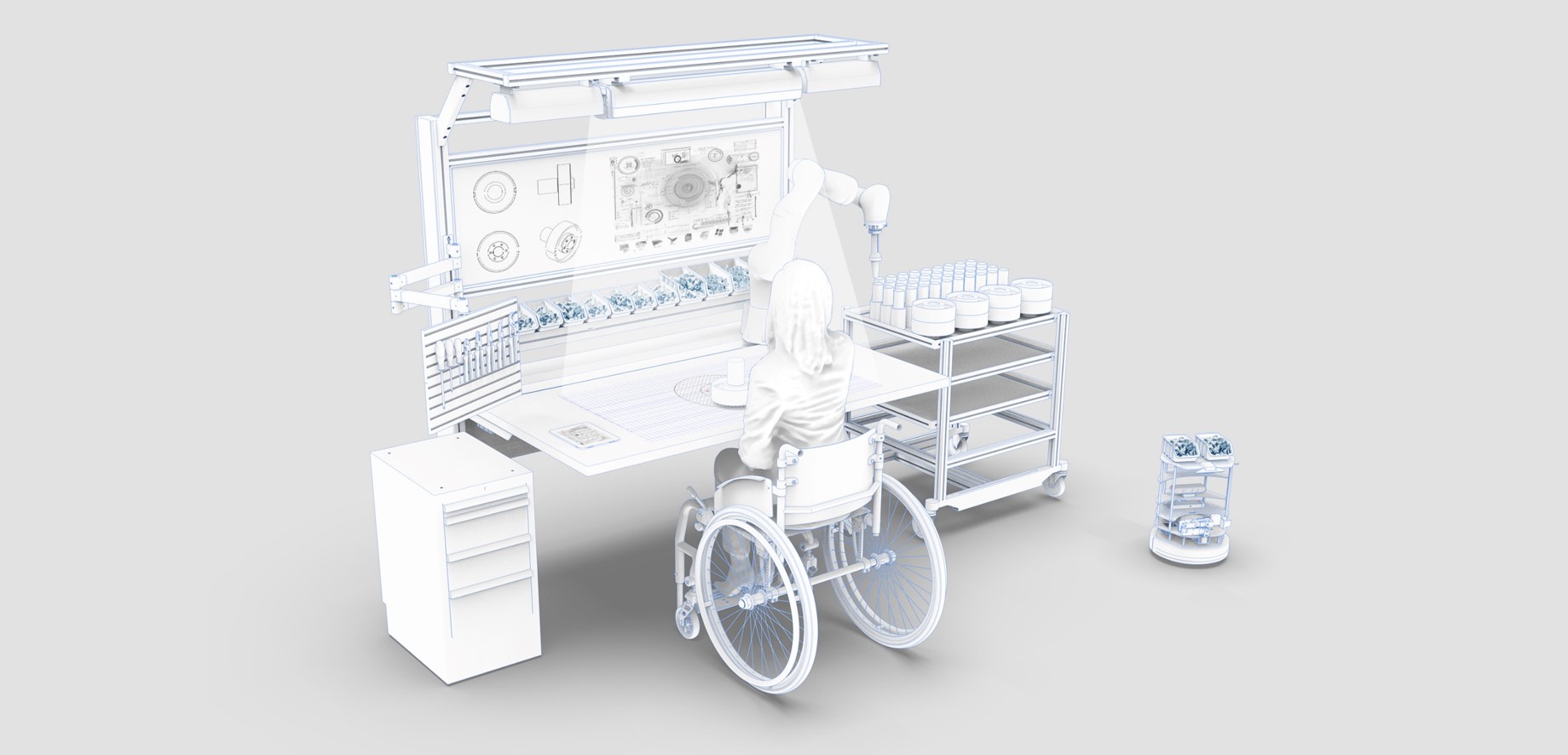
Das Projekt Next Generation verfolgt das Ziel inklusive Arbeitsplätze mithilfe von Mensch-Roboter-Kollaboration (MRK) zu
entwickeln, um Lebensqualität zu steigern.
Menschen mit Schwerst- und Mehrfachbehinderung arbeiten meist unterhalb ihren
persönlichen kognitiven Fähigkeiten. Dies sorgt bei den Betroffenen für große Unzufriedenheit.
Aus diesem Grund gilt es innerhalb des Projekts „Next Generation – mit flexiblen
Roboterlösungen inklusive Arbeit entwickeln“ Arbeitsplätze mithilfe von Mensch-Roboter-
Kollaboration (MRK) zu entwickeln. Das Projekt soll Menschen mit Behinderung ermöglichen, am
Arbeitsleben teilzunehmen. Dies kann sowohl die Lebensqualität steigern als auch
Selbstverwirklichung, Selbstbestimmung und eine positive Persönlichkeitsentwicklung mit sich
führen.
Für Aufgaben aus der Industrie wurden zahlreiche Unternehmen aus dem Großraum Köln
gebeten, mögliche Musteranwendungen für die Konzeption des inklusiven Arbeitsplatzes zur
Verfügung zu stellen. Dabei wurden zwei Tätigkeiten zum einen bei der Buschhoff Stanztechnik
GmbH & Co. KG und zum anderen bei der Cölner Hofbräu P. Josef Früh KG identifiziert. Die
Konzeption und Umsetzung kann nun beginnen. Weitere aktuelle Informationen gibt es auf der
Website des Next Generation-Projektes.
Ansprechpartner:
Igus Delta Demonstrator
Sebastian Lüke entwickelte in Rahmen seiner Masterarbeit einen Demonstrator inkl. Steuerung, Trajektorienplanung und User Interface für die igus Delta Baukasten.
Ansprechpartner:
Förderprojekt für kollaborierenden Roboter

![]()
- Die Rheinisch Westfälischen Technischen Hochschule (RWTH) Aachen forscht zusammen dem Kölner Automobilhersteller Ford und dem Landschaftsverband Rheinland (LVR) an einem Arbeitsplatz mit einer neuen Version eines kollaborierenden Roboters
- LVR fördert Modellprojekt mit 372.000 Euro aus Mitteln der Ausgleichsabgabe
- Neuer Arbeitsplatz erfüllt Voraussetzung für den Einsatz schwerbehinderter Beschäftigter
Aachen, 24. Juni 2020 – Gemeinsam mit dem Kölner Automobilhersteller Ford und dem Landschaftsverband Rheinland (LVR) arbeitet die Rheinisch Westfälischen Technischen Hochschule Aachen (RWTH) an einer neuen Einsatzmöglichkeit für einen kollaborierenden Roboter. Der LVR fördert dieses Modellprojekt unter dem Titel „Mensch-Roboter-Kollaboration – Umgestaltung eines Arbeitsplatzes in der Automobilbranche für schwerbehinderte Beschäftigte“ mit 372.000 Euro durch sein Inklusionsamt aus den Mitteln der Ausgleichsabgabe. Ziel ist es, den Roboter dergestalt in die Fertigung einzubauen, dass ein schwerbehinderter Mensch sich mit dem Roboter einen Arbeitsplatz teilt. Das Besondere an diesem Projekt ist, dass der Roboter so konfiguriert wird, dass er mit dem Menschen interaktiv „Hand in Hand“ arbeitet und nicht durch eine Schutzeinrichtung getrennt ist.
Das Projekt startete offiziell am 1. Juni 2020. Die Aufgabe des Automobilherstellers, der den Roboter in seinem Kölner Motorenwerk einsetzen wird, ist die Gestaltung des Arbeitsplatzes sowie die Definition der Konfiguration, so dass sowohl die Voraussetzungen der taktgebundenen Fertigung, die Anforderungen der Arbeitssicherheit als auch die barrierefreie Gestaltung des Arbeitsplatzes berücksichtigt sind.
Die Projektdauer ist auf 19 Monate (1. Juni 2020 bis 31. Dezember 2021) angelegt. Ziel ist es, an diesem Beispiel Erkenntnisse für den Einsatz solcher Mensch-Maschine-Kollaborationen zur Beschäftigungssicherung schwerbehinderter Menschen zu gewinnen und vor allem kleinere und mittelständige Unternehmen dahingehend zu beraten.
Seitens der RWTH Aachen ist das Institut für Getriebetechnik, Maschinendynamik und Robotik (IGMR) beteiligt, welches mit seinen Kompetenzen Robotik und Kollaboration sowohl die wissenschaftliche Begleitung als auch die weiteren Transfers sichert.
Die weiteren Partner der RWTH:
Landschaftsverband Rheinland (LVR)
Das LVR-Inklusionsamt ist zuständig für die Teilhabe schwerbehinderter Menschen auf dem allgemeinen Arbeitsmarkt im Rheinland. Es bietet sowohl für Arbeitgeber als auch für schwerbehinderte Menschen unterschiedliche Unterstützungsangebote an und arbeitet mit verschiedenen Partnern zusammen. Die Angebote umfassen beispielsweise finanzielle Förderung zur Schaffung von Arbeits- und Ausbildungsplätzen, zur behinderungsgerechten Einrichtung von Arbeitsplätzen oder bei außergewöhnlichen Belastungen während der Beschäftigung. Für das LVR-Inklusionsamt verspricht der zu erwartende und zu veröffentlichende Erkenntnisgewinn aus dem neuen Modellprojekt einen deutlichen Nutzen, um die Beschäftigungsmöglichkeiten von Menschen mit Behinderung zu erweitern und neue technische Entwicklungen zur Förderung der Inklusion zu nutzen.
Ford-Werke GmbH
Die Ford-Werke GmbH ist ein deutscher Automobilhersteller und Mobilitätsanbieter mit Sitz in Köln. Das Unternehmen beschäftigt an den Standorten Köln, Saarlouis und Aachen mehr als 22.000 Mitarbeiterinnen und Mitarbeiter. Seit der Gründung im Jahr 1925 haben die Ford-Werke mehr als 47 Millionen Fahrzeuge produziert.
Kontakt:

Prof. Dr.-Ing. Mathias Hüsing
stv. Institutsdirektor
Tel.: 0241 – 80 95554
E-Mail: huesing(at)igmr.rwth-aachen.de


