

Workshop zu Umweltwahrnehmung in Sharework
Beim Trainings-Workshop „Manufacturing environment perception for an effective human-robot collaboration“ konnten wir unsere Themen in den Bereichen Werkraumüberwachung und Objekterkennung mit einfachen Lernverfahren präsentieren. Der Vortrag umfasst eine kurze theoretische Einführung in das maschinelle Lernen mit Zufallswäldern, präsentiert die Arbeitspakete des IGMR in Sharework und gibt eine paar Tipps für die Verwendung der Methoden in eigenen Projekten. Neben unseren Arbeitspaketen wurden auch die Beiträge der anderen Partner, u.a. auf dem Gebiet der Ontologie und Bewegungsprimitive präsentiert.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
Daniel Gossen
Umgestaltung von Arbeitsplätzen mittels MRK bei Ford

Seit April 2021 arbeitet bei Ford leistungsgewandelte Mitarbeitende erfolgreich mit einem kollaborativen Roboter in der Linienproduktion zusammen. Der Roboter übernimmt das belastende Einpressen der VCT-Magnetspulen in den Motordeckel und der Mitarbeitende verschraubt die Spulen. Dabei arbeiten Mensch und Roboter zeitgleich im selben Arbeitsraum. Die wichtigsten Erkenntnisse und Ergebnisse des Projekts sind im Strategiepapier zusammengefasst.
Weitere Informationen zu dem Projekt findet ihr hier.
Ansprechpartner:
Entwicklung neuer Handgelenke für den Paragrip
In einem gemeinsamen Forschungsprojekt des IGMR mit dem ISF der RWTH Aachen wird an der Multidirektionalen Additiven Fertigung (MDAM) metallischer Bauteile geforscht. Um den mehrarmigen Paragrip-Roboter für diesen Einsatzzweck zu optimieren hat der Student Raphael Hoffmann im Rahmen seiner Bachelorarbeit ein innovatives Konzept neuer Handgelenke erarbeitet. Dieses ermöglicht es, den Schweißstrom ohne ein sonst zusätzlich benötigtes Massekabel direkt über die Handgelenke zu leiten. Darüber hinaus ermöglichen sie ein formschlüssiges Greifen des Druckbettes mit Selbstzentrierung zum Minimieren von Positionierungsungenauigkeiten.
Weitere Informationen zu dem Projekt könnt ihr hier nachlesen.
Das Video dazu findet ihr auf unserem YouTube Kanal: https://youtu.be/VdT1rjYG4D0
Ansprechpartner:
MobiLamas

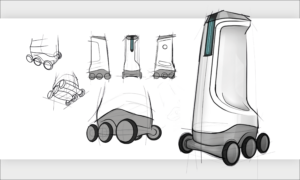
MobiLamas ist ein Konzept für free-float Ladung in der Stadt der Zukunft. In unserer Vision wird sich der Individualverkehr vom Auto auf öffentliche Verkehrsmittel verlagern, die durch sogenannte Last-Mile Fahrzeuge (z. B. Elektrofahrräder oder -roller) ergänzt werden. In solchen Umgebungen sind ökologische und ökonomische Lösungen erforderlich, um sicheres und intelligentes Laden für eine Vielzahl von Geräten zu ermöglichen. MobiLamas sind intelligente mobile Roboter, die mit Last-Mile Fahrzeugen und Ladestationen interagieren und sich in Anwesenheit von Fußgängern sicher im städtischen Raum bewegen.
Ansprechpartner:
IGOR – unser hauseigener Roboter
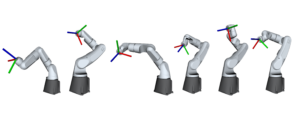
Wir haben das Konzept des hauseigenen Roboters IGOR (https://blog.rwth-aachen.de/robotik/igor-konzept-eines-hauseigenen-6-achs-roboters/) weiter entwickelt. Nun stehen verschiedene Konfigurationen des Roboters mit einer unterschiedlichen Anzahl von Freiheitsgraden zur Verfügung. Jede Konfiguration hat auch eine unterschiedliche Art von Handgelenk und Arm. Alle Modelle sind über Robot Operating System ROS steuerbar.
Ansprechpartner:
Wie Baustellenroboter eine Wand bearbeiten
Der eigens entwickelte Roboter verfügt über 7 Freiheitsgrade, die ausschließlich über Drehgelenke realisiert werden. Durch die Redundanz kann der Roboter auch in verwinkelten Situationen wie Fluren oder Nischen seine volle Leistung entfalten. Im Video ist auf der linken Seite eine vertikale Trajektorie zu sehen, in der der Roboter vom Boden bis in eine Höhe von 2,50m eine Wand bearbeitet. Das Video auf der rechten Seite zeigt das horizontale Abzeilen einer Wand unmittelbar vor dem Roboter.
Weitere Informationen zu diesem Projekt findet ihr auf der IGMR Website.
Ansprechpartner:
Lösungen der Praktischen Übungen in Robotic Systems
Auch in diesem Jahr haben uns wieder kreative Lösungen für Problemstellungen aus dem Modul Robotic Systems erreicht. Die Studierenden konnten erste Erfahrungen bei der Programmierung eines Fanuc Roboters in Roboguide sammeln. Eine Umfangreiche Programmieraufgabe galt es weiterhin an der Fanuc Education Cell zu lösen. Auf Grund der Einschränkungen der Präsenzveranstaltungen mussten alle Lösungen virtuell in Roboguide gelöst werden. Im nächsten Winter wird dann wieder am realen Roboter erprobt.
Ansprechpartner:
Herzlich Willkommen am IGMR!

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Robotic Systems for Service Robotic Applications

Zoom-Link: https://rwth.zoom.us/j/96731705824?pwd=YUtvZEE5enhiRGIzalVEeG9Xa09ldz09
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
Frohe Weihnachten und frohes neues Jahr!


Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Wir wünschen euch eine schöne Weihnachtszeit und einen guten Rutsch ins neue Jahr! Bleibt gesund 💙 #merrychristmas #happynewyear
Ansprechpartner:


