

Schlagwort: ‘MDAM’
Kollisionsfreie Trajektorienplanung für wachsende Bauteile in der robotergestützten Fertigung

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Im Rahmen des Forschungsprojekts FunkDAF untersucht das IGMR gemeinsam mit dem MSE und dem VCI der RWTH Aachen die Grenzen der additiven Fertigung. Unser Fokus liegt auf der multidirektionalen Fertigung: Anstatt Bauteile wie beim herkömmlichen 3D-Druck in planare Schichten zu zerlegen, generieren wir Druckpfade basierend auf Spannungsdaten, um lastpfadgerechte und somit stabilere Strukturen zu schaffen.
Die Kinematik: Wir nutzen einen 6-Achs-Industrieroboter in einer „Robot-Guided“-Konfiguration. Dabei führt der Roboter das Druckbett samt Bauteil unter einem stationären Extruder. Diese Nutzung aller sechs Freiheitsgrade ermöglicht den Druck komplexer, nicht-planarer Geometrien und erlaubt es, Bauteilabschnitte in variablen Orientierungen zur Schwerkraft zu fertigen.
Die Herausforderung: Die Trajektorienplanung für solche Systeme ist hochkomplex. Anders als bei statischen Druckbetten bewegen wir hier ein dynamisch wachsendes Werkstück im Raum. Das Bauteil selbst wird während des Prozesses zu einem potenziellen Kollisionsobjekt gegenüber der Düse und der Umgebung. Erschwerend kommt hinzu, dass der Extrusionsprozess zwingend einen minimalen Arbeitsabstand zur stationären Düse erfordert. Die Pfadplanung muss also nicht nur die Extrusion berücksichtigen, sondern auch präzise berechnen, wie sich das Bauteilvolumen verändert.
Besonders kritisch sind die Travelpfade (Leerfahrten) zwischen einzelnen Drucksegmenten. Hier muss der Roboter das Bauteil oft vollständig umorientieren, um den nächsten Abschnitt kollisionsfrei zu erreichen. Unsere aktuellen Experimente (siehe Bilder) demonstrieren dies eindrucksvoll:
- Helix auf Zylinder: Erfordert eine kontinuierliche, koordinierte Rotation, um Material auf einer gekrümmten Oberfläche abzulegen.
- Orthogonale Quader: Zeigen die Fähigkeit, durch eine 90°-Umorientierung Überhänge ohne Stützstrukturen zu drucken.
Ansprechpartner: Mark Witte
Weitere Informationen zum Projekt finden Sie hier.
Erste Bewegung des PARAGRIPs mit neuer Steuerung
Um für seine zukünftigen Aufgaben in der Multidirektionalen Additiven Fertigung (MDAM) mittels Lichtbogenschweißen (WAAM) optimal gewappnet zu sein, wurde die Steuerungsarchitektur des PARAGRIPs grundlegend überarbeitet. Ab sofort können Bewegungen aller vier Arme unter ROS2 mit MoveIt geplant, simuliert und am echten Roboter ausgeführt werden. Dabei werden die Gelenkstellungen des physischen Roboters stets an ROS2 zurückgespielt, wodurch eine Integration von online-Planungsalgorithmen in der Zukunft ermöglicht wird. Das Video zeigt die Planung und Ausführung einer einfachen Testbewegung des PARAGRIPs.
Weitere Informationen zu dem Projekt findet ihr hier.
Ansprechpartner: Jan Wiartalla
Erste FDM Druckversuche im Rahmen der Multidirektionalen Additiven Fertigung
Die ersten Hürden des prototypischen Aufbaus sind geschafft. Nun kann die entwickelte Prozessvorbereitung getestet werden.
https://youtu.be/WlblPv46NG4
Im Rahmen des DFG geförderten Projekts soll die Multidirektionale Additive Fertigung für das Lichtbogenschweißen erforscht werden. Die Prozessvorbereitung soll nun zunächst im FDM Verfahren validiert werden.
Ansprechpartner:
Geplanter Umbau des Paragrip

Um für seine neue Aufgabe in der Additiven Fertigung mittels Lichtbogenschweißen (WAAM) optimal gewappnet zu sein, muss der Paragrip einigen konstruktiven Änderungen unterworfen werden.
In einem gemeinsamen Forschungsprojekt des IGMR mit dem ISF der RWTH Aachen wird an der Multidirektionalen Additiven Fertigung (MDAM) metallischer Bauteile geforscht. Durch das Bewegen des Druckbettes mittels eines Manipulators bei gleichzeitig feststehender Schweißpistole kann das zu druckende Bauteil stets so ausgerichtet werden, dass Stützstrukturen vermieden werden können. Um die Bewegung der Druckplatte dabei nicht durch die Kinematik eines seriellen Industrieroboters zu limitieren, soll der am IGMR entwickelte und gebaute Paragrip mit seinem modularen objektintegrativen Handhabungsdesign zum Einsatz kommen. Die Abbildung zeigt ein Rendering des geplanten Umbaus des Paragrips für den Einsatz in der Multidirektionalen Additiven Fertigung mittels Lichtbogenschweißen.
Ansprechpartner:
Manipulatorspezifische Pfadplanung für die Multidirektionale Additive Fertigung
In einem gemeinsamen Forschungsprojekt des IGMR mit dem ISF der RWTH Aachen wird an der Multidirektionalen Additiven Fertigung metallischer Bauteile geforscht.
Mithilfe der Multidirektionalen Additiven Fertigung (MDAM) wird das schichtweise Aufbauen komplexer Bauteile ohne Stützstrukturen ermöglicht. Durch das Bewegen der Grundplatte mittels eines Industrieroboter bei gleichzeitig feststehender Schweißpistole kann das zu druckende Bauteil stets so ausgerichtet werden, dass Stützstrukturen vermieden werden können. Die besondere Herausforderung liegt hierbei in der Berücksichtigung besonderer Schweißverfahren mit externer Drahtzuführung sowie der Verwendung mitgeführter Sensorik zur Prozessüberwachung. Dadurch ergibt sich eine Abhängigkeit der Orientierung der Schweißpistole relativ zum aktuell gedruckten Pfad.
Im Rahmen seiner Masterarbeit entwickelte Jan Wiartalla einen Pfadplanungsalgorithmus, der hierfür innerhalb vorgegebener, ebener Bauteil-Slices einen ausführbaren und nach Möglichkeit kontinuierlichen Pfad berechnet, der die Querschnittsfläche vollständig ausfüllt. Dieser ist roboterspezifisch, sodass der Algorithmus stets den aktuell eingesetzten Roboter und dessen Limitierungen berücksichtigt. Durch eine standardisierte Schnittstelle kann das Robotermodell einfach ausgetauscht und der Algorithmus so schnell an unterschiedliche Testumgebungen adaptiert werden. Das Video illustriert in vereinfachter Weise das Vorgehen des Algorithmus.
https://youtu.be/chuD57ja9JE
Ansprechpartner:
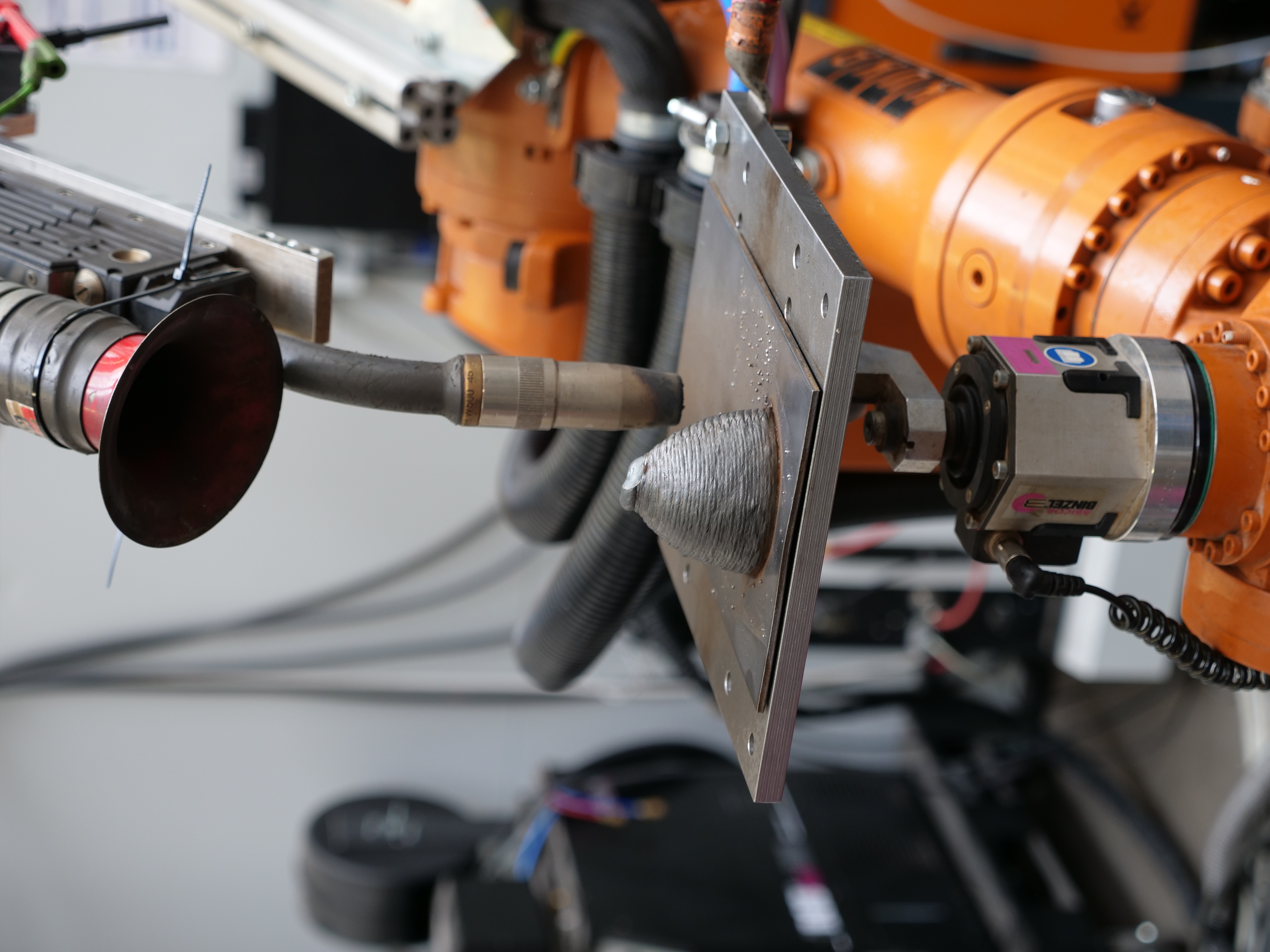
Multidirektionale Additive Fertigung im Lichtbogenschweißverfahren

Im Zusammenarbeit mit dem ISF, RWTH Aachen forschen wir am IGMR an der Multidirektionalen Additiven Fertigung. In dieser Anwendung zur Herstellung von Metallbauteilen.
Die Multidirektionale Additive Fertigung ermöglicht sowohl im klassischen FDM-Verfahren mit Kunststoff als auch bei schichtweisen Aufbau im Lichtbogenschweißverfahren die Herstellung von komplexen Bauteilen ohne Stützstrukturen. Am IGMR wird dazu die gesamte Prozesskette der Additiven Fertigung auf die besonderen Herausforderungen dieses Verfahren aus robotischer Sicht erweitert. Dazu gehört die Zerlegung eines virtuellen Bauteils in Schichten (Slicing), die anschließende Planung eines kollisionsfreien Aufbaus, die Generierung von ausführbaren Roboterpfaden zum Ausfüllen der Schichten sowie der notwendigen Trajektorienplanung.
https://youtu.be/vYejNjBSUp8
Ansprechpartner:
Markus Schmitz
Carlo Weidemann
Kick-Off DFG Projekt: Multidirektionale Additive Fertigung
Im neuen DFG-Projekt werden Bauteile mit Robotern im Lichtbogenschweißverfahren Additive gefertigt. Dabei soll die Multidirektionalität ausgenutzt werden.
Ansprechpartner:
WAAM-Simulation mit ROS in Gazebo
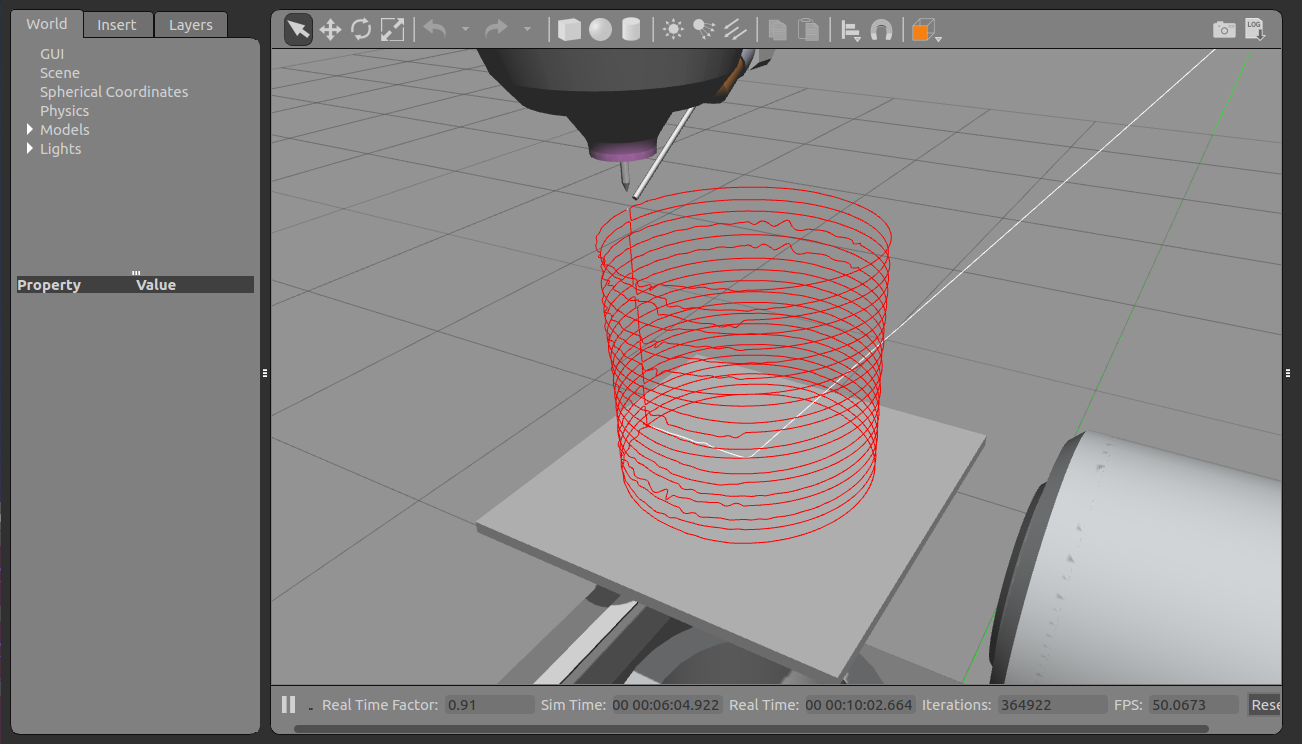
Vincent Brünjes entwarf in seiner Masterarbeit eine Gazebo-Erweiterung, um multidirektionale, additive Wire+Arc-Fertigungsprozesse zu simulieren.
Ansprechpartner:


