

Schlagwort: ‘Kollaboration’
IIDEA beim daaap-Jahrestreffen 2025 in Koblenz

Im März durften wir als Aussteller und Netzwerkmitglied von daaap am diesjährigen Jahrestreffen bei den Rhein-Mosel-Werkstätten in Koblenz teilnehmen.
Ein besonderes Highlight: Die Veranstaltung wurde unter anderem von Frau Schall, Ministerin für Arbeit, Soziales, Transformation und Digitalisierung in Rheinland-Pfalz, eröffnet. Sie nahm sich Zeit, das IIDEA-Projekt kennenzulernen und konnte unseren Musterarbeitsplatz sogar selbst ausprobieren.
Wir freuen uns sehr über das Interesse der teilnehmenden Werkstätten an unserem Projekt. Der direkte Austausch, wertvolle Gespräche und neue Kontakte zeigen: Die Vision von inklusiver Digitalisierung wird geteilt und weitergetragen.
Ansprechpartner:
Mathias Hüsing
IIDEA CoBot

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
In diesem Video erläutert Prof. Mathias Hüsing des Instituts für Getriebetechnik, Maschinendynamik und Robotik der RWTH Aachen University einfache Teaching-Möglichkeiten zum Anlernen von kollaborativen Robotern, kurz CoBots zur Unterstützung von behinderten und eingeschränkten Personen bei der Arbeit im Rahmen von Mensch-Roboter-Kollaboration.
Robotik ermöglicht Inklusion.
Weitere Informationen zum IIDEA Projekt finden Sie auf der Projektinternetseite
https://www.iidea.rwth-aachen.de
Robot Cooking – Überführung von Beobachtungen in eine Planungssprache
Überführung von Beobachtungen in eine Planungssprache: Ein automatisierter Ansatz im Bereich des Kochen
Im Robot Cooking Projekt wird eine automatisierte Methode entwickelt, um Bewegungsdaten zu analysieren, identifizieren und in eine maschinenlesbare Planungssprache zu überführen. Dies geschieht am Beispiel eines Kochszenarios, indem die Bewegungsdaten durch die Aufzeichnung der Handpose des Kochs erfasst werden.
Die Aufzeichnung erfolgt mit einem Motion-Capture-System, bestehend aus sieben Kameras und einem Handschuh mit drei Markern auf dem Handrücken des Kochs. Die Position der Marker wird durch Triangulation bestimmt. Dies liefert genügend Informationen, um die Handpose abzuleiten. Die Aufnahme erfolgt mit 120 Bildern pro Sekunde. Vor dem Kochvorgang werden alle Objekte im Arbeitsraum identifiziert und ihre Ausgangspositionen bestimmt. Die Bewegungsdaten werden kontinuierlich aufgezeichnet und in Posen mit Zeitstempeln umgewandelt. Zusätzliche Informationen wie Geschwindigkeit, Beschleunigung und Winkel in Bezug auf die Tischplatte werden aus den Rohdaten abgeleitet.
Eine erste Strukturierung des Datensatzes erfolgt durch die Identifizierung der Nebenhandlungen mittels Klassifikation. Hierbei werden Greifen, Bewegen und Ablegen als wiederkehrende Handlungen erkannt. Ein eigener Trainingsdatensatz wird verwendet, um einen Klassifikator zu trainieren, der diese Handlungen erkennt. Dies ermöglicht eine einfachere Analyse der verbleibenden Aktionen.
Das Clustering wird angewendet, um unbekannte Aktionen zu identifizieren. Ein dynamischer Ansatz ermöglicht die Analyse trotz hoher Variabilität in der Ausführung. Ein eindeutiger Fingerabdruck für jede Handlung wird gefunden, basierend auf der Ausrichtung des Handrückens und seiner Geschwindigkeit auf der Tischebene, um jedes Einzelbild einem Cluster und schließlich einer Aktionen zuzuordnen.
Die gewonnenen Erkenntnisse aus Klassifikation und Clustering werden in eine maschinenlesbare Planning Domain Definition Language (PDDL) übersetzt. Ein Zeitplan wird erstellt, wobei bekannte Aktionen direkt zugeordnet werden. Start- und Endpositionen werden festgelegt, und virtuelle Objektverfolgung wird verwendet, um den Verlauf von Objekten während des Kochens darzustellen. Für unbekannte Aktionen werden Vorbedingungen und Auswirkungen dynamisch gehandhabt. Die Ergebnisse werden in eine maschinenlesbare PDDL übersetzt. Diese formale Darstellung ermöglicht die effiziente automatische Planung und Ausführung der zuvor demonstrierten Kochaufgabe.
Zusätzliche Informationen sind im oben verlinkten Video, dem Poster und dem Paper verfügbar.
Ansprechpartner:
Markus Schmitz
Entwicklung neuer Handgelenke für den Paragrip
In einem gemeinsamen Forschungsprojekt des IGMR mit dem ISF der RWTH Aachen wird an der Multidirektionalen Additiven Fertigung (MDAM) metallischer Bauteile geforscht. Um den mehrarmigen Paragrip-Roboter für diesen Einsatzzweck zu optimieren hat der Student Raphael Hoffmann im Rahmen seiner Bachelorarbeit ein innovatives Konzept neuer Handgelenke erarbeitet. Dieses ermöglicht es, den Schweißstrom ohne ein sonst zusätzlich benötigtes Massekabel direkt über die Handgelenke zu leiten. Darüber hinaus ermöglichen sie ein formschlüssiges Greifen des Druckbettes mit Selbstzentrierung zum Minimieren von Positionierungsungenauigkeiten.
Weitere Informationen zu dem Projekt könnt ihr hier nachlesen.
Das Video dazu findet ihr auf unserem YouTube Kanal: https://youtu.be/VdT1rjYG4D0
Ansprechpartner:
Teilnahme am A+A Kongress in Düsseldorf

Präsentation des Next Generation Arbeitsplatzes und Vortrag zum Thema „MRK als Assistenzmedium für inklusive Arbeitsplätze
Auf dem A+A Kongress in Düsseldorf haben wir gemeinsam mit der Caritas Wertarbeit Köln das Next Generation Projekt präsentiert. Der Kongress wird von vielen Interessierten und Experten aus dem Themenfeld „Arbeitsschutz und Arbeitssicherheit“ besucht und regt mit vielen spannenden Vorträgen über aktuelle Themen aus diesen Bereichen den Austausch an. An beiden Tagen gab es viele Gespräche mit interessierten Teilnehmern des A+A Kongresses. Zusätzlich hat Carlo Weidemann am letzten Tag einen Vortrag zum Thema „Mensch-Roboter-Kollaboration als Assistenzmedium für inklusive Arbeitsplätze“ gehalten. Inhalte dieses Vortrags sind neben der Darlegung der Motivation für die Gestaltung inklusionswirksamer Arbeitsplätze die inklusionsfördernden Projekte, die vom IGMR begleitet und mitgestaltet werden. Dies sind das Next Generation Projekt und das Projekt mit Ford zur Umgestaltung eines Arbeitsplatzes für leistungsgewandelte Mitarbeiter.
Ansprechpartner
Kollaborierender Roboter bei Ford schafft Jobs für leistungsgewandelte Beschäftige
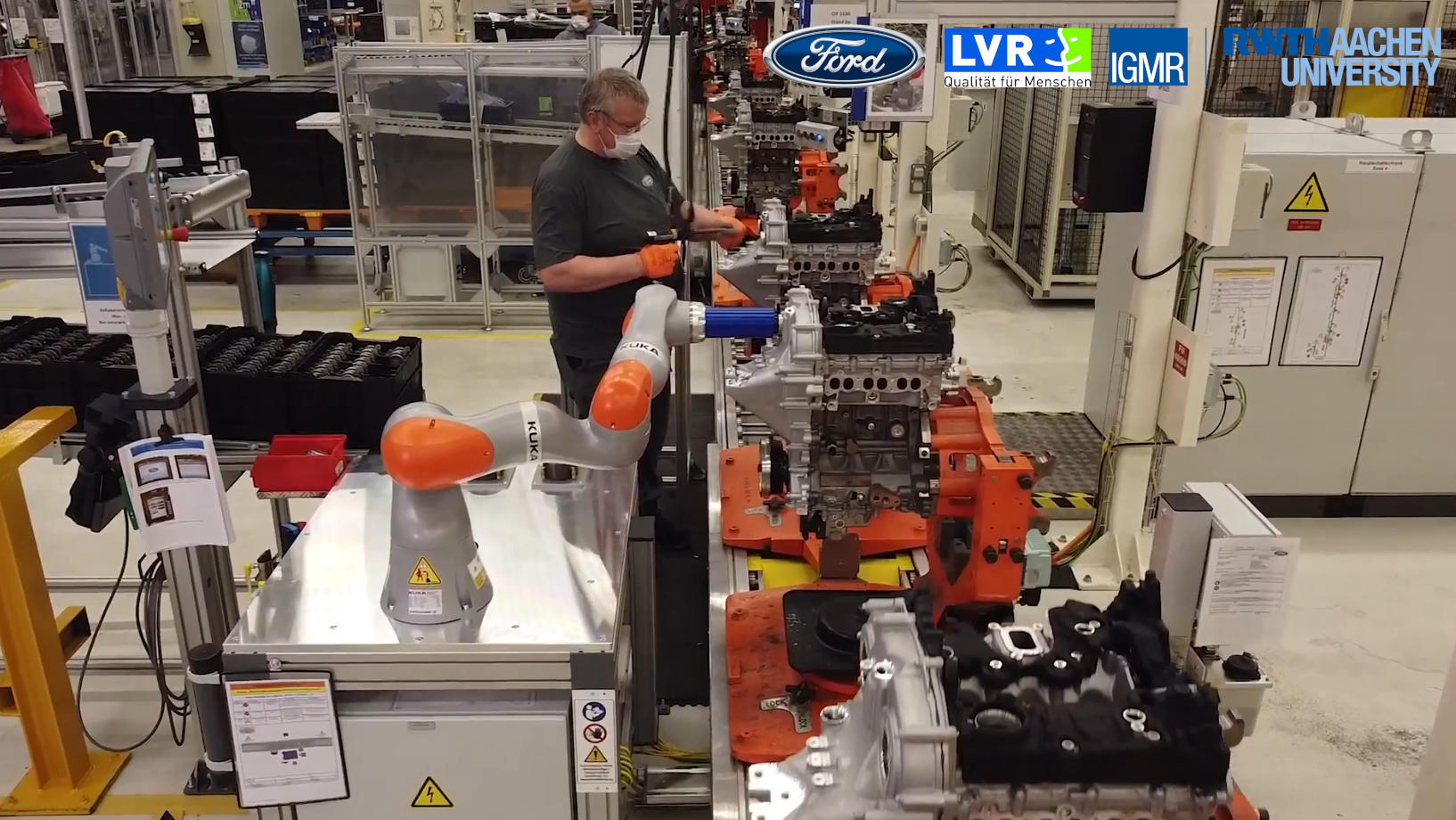
- Ford richtet mit Hilfe eines kollaborierenden Roboters einen Arbeitsplatz für Beschäftigte mit Schwerbehinderung ein
- Einzigartig ist die enge räumliche Zusammenarbeit zwischen Mensch und Roboter
- Nach ersten Probeläufen reibungslose Zusammenarbeit
- Ford hat zusammen mit der Rheinisch Westfälischen Technischen Hochschule Aachen (RWTH) und dem Landschaftsverband Rheinland (LVR) diesen einmaligen Arbeitsplatz mit einer neuen Version eines kollaborierenden Roboters eingerichtet
AACHEN, 16. August 2021 – Ford hat die Einrichtung eines einzigartigen kollaborierenden Roboters erfolgreich abgeschlossen. Nach rund einem Jahr Forschung, Entwicklung, Mitarbeiterschulung und Trockenläufen arbeitet der so genannte Kobot, ein Wortspiel aus kollaborierend (zusammenarbeitend) und Roboter, nun taktgebunden im Linienfluss im Kölner Motorenwerk des Automobilherstellers. Dort setzt er gemeinsam mit seinem menschlichen Partner VCT-Magnetspulen in einen Öler ein, nimmt die Magnetspulen anschließend auf und presst sie in den Stirndeckel des Motorblocks. Diese Arbeit erfordert große Eindruckkräfte, die selbst für gesunde Arbeitende auf Dauer belastend sein können, und die nun der Kobot für den Menschen übernimmt. Bei den menschlichen Partnern handelt es sich um Beschäftigte mit Schulter- und Handgelenkproblemen. So konnte ein Arbeitsplatz für zwei Beschäftigte mit Schwerbehinderung geschaffen werden.
Ford, die Rheinisch Westfälisch Technische Hochschule in Aachen (RWTH) sowie der Landschaftsverband Rheinland (LVR) forschten rund ein Jahr lang an dieser neuen Einsatzmöglichkeit für einen kollaborierenden Roboter. Das vom LVR mit 372.000 Euro geförderte Modellprojekt hatte das Ziel, den Roboter dergestalt in eine Fertigung einzubauen, dass ein schwerbehinderter Mensch sich einen Arbeitsplatz mit einem Roboter teilt. Das Besondere daran ist die Konfiguration des Roboters, so dass er mit dem Menschen interaktiv „Hand in Hand“ arbeitet und nicht durch eine trennende Schutzeinrichtung, wie z.B. einen Maschinenschutzzaun, getrennt sein muss. Neben der exakten Programmierung des Roboters war auch eine intensive Schulung der Beschäftigten nötig, damit sie einerseits die „Scheu“ vor diesem Kobot ablegen, zum anderen trotzdem noch die nötige Vorsicht walten lassen. Roboter werden seit vielen Jahrzehnten in der Automobilindustrie eingesetzt, allerdings zumeist als überdimensional große Maschinen, die hinter Schutzvorrichtungen arbeiten oder als autonome Fahrroboter, die Materialien transportieren. In diesem Fall bestand die Herausforderung darin, den Arbeitsplatz so zu gestalten, dass sowohl die Voraussetzungen der taktgebundenen Fertigung, die Anforderungen der Arbeitssicherheit als auch die barrierefreie Gestaltung des Arbeitsplatzes berücksichtigt sind.
„Ich bin stolz, dass wir mit diesem Vorzeigeprojekt einen Arbeitsplatz so umgestalten konnten, dass wir ein weiteres Angebot für leistungsgewandelte Beschäftigte haben“, so Dirk Heller, Geschäftsführer Fertigung Ford-Werke GmbH. „Die Akzeptanz unter der Belegschaft ist groß, und besonders die an diesem Arbeitsplatz eingesetzten Mitarbeiter freuen sich auf die neue Aufgabe.“
„Gemeinsam haben wir einen einzigartigen kollaborativen Arbeitsplatz in der Industrie umgesetzt. Ich kenne kaum solch erfolgreich umgesetzte Kollaborationsarbeitsplätze“, erklärt Mathias Hüsing, Professor an der RWTH Aachen. „Warum dieser Mangel? Die menschenzentrierte Arbeitsplatzplanung unter Berücksichtigung von Montageaufgaben, technischen Möglichkeiten und Sicherheitsanforderungen ist (noch) nicht etabliert. Unsere Forschung im Bereich kollaborativer Prozessplanung fokussiert dieses. Inzwischen setzen wir Kollaborationsarbeitsplätze erfolgreich bei anderen Projekten um, wo es darum geht, Arbeitsplätze für Menschen mit Behinderungen auf dem ersten Arbeitsmarkt mit Unterstützung von kollaborierenden Robotern einzurichten.“
„Mit den Mitteln der Ausgleichsabgabe hat das LVR-Inklusionsamt in den letzten Jahren schon auf sehr vielfältige Weise Arbeitsplätze bei Ford umgestalten und sichern können. Das ist eine über die Jahre gewachsene und sehr gute Kooperation zwischen Ford und LVR mit großem Nutzen für die Förderung von Inklusion auf dem Arbeitsmarkt“, ergänzt Christoph Beyer, Leiter des LVR-Inklusionsamtes. „Auch die Erkenntnisse aus dem aktuellen Modellprojekt Kobot helfen uns enorm dabei, die Beschäftigungsmöglichkeit von Menschen mit Behinderung erweitern und neue technische Entwicklungen nutzen zu können. Ford hat hier als großes Unternehmen im Rheinland eine bedeutende Vorbildunktion inne.“
Das Institut für Getriebetechnik, Maschinendynamik und Robotik der RWTH Aachen begleitet das Projekt wissenschaftlich und entwickelt dabei ein Strategiepapier auf Grundlage des im Projekt entstandenen Arbeitsplatzes. Dieses Strategiepapier ist dazu gedacht, die Umsetzung des Arbeitsplatzes für Menschen mit Behinderung im Detail zu beleuchten. In diesem Sinne werden die Veränderungen der Beschäftigungssituation für die Beschäftigten, die Wirtschaftlichkeit der Umsetzung, der Ablauf der Implementierung und die Unterschiede zur Implementierung einer klassischen Industrieroboterzelle sowie die sicherheitstechnischen Herausforderungen dargestellt, analysiert und dokumentiert. So ist gewährleistet, dass zukünftige Projekte von den Erfahrungen und Erkenntnissen aus dem vorliegenden Projekt profitieren.
Das LVR-Inklusionsamt ist zuständig für die Teilhabe schwerbehinderter Menschen auf dem allgemeinen Arbeitsmarkt im Rheinland. Es bietet sowohl für Arbeitgeber als auch für schwerbehinderte Menschen unterschiedliche Unterstützungsangebote an und arbeitet mit verschiedenen Partnern zusammen. Die Angebote umfassen beispielsweise finanzielle Förderung zur Schaffung von Arbeits- und Ausbildungsplätzen, zur behinderungsgerechten Einrichtung von Arbeitsplätzen oder bei außergewöhnlichen Belastungen während der Beschäftigung.
Kontakt
Aufbau der Next Generation Arbeitsplätze

Die Lieferung der Arbeitsplätze ist erfolgt, sodass der Aufbau und die Programmierung beginnen kann.
Kurz vor Weihnachten sind die Arbeitsplätze und das Zubehör beim IGMR der RWTH Aachen angekommen. Somit hat der Aufbau des Arbeitsplatzes begonnen und die Programmierung der Roboter für die Musteranwendungen kann starten.
Dazu sind der KUKA LBR iiwa 7 und der KINOVA JACO2 am Arbeitsplatz befestigt worden und werden für die verschiedenen Greifer (Adaptivgreifer, Parallelgreifer und 2-Finger-Greifer) sowie Bedienelemente konfiguriert. Zusätzlich werden die Roboter für die Musteranwendung der Industrieunternehmen programmiert. Die modulare Programmierung ist dabei essentiell, um die Teilnehmenden entsprechend ihrer Bedürfnisse bestmöglich zu unterstützen.
Im März 2021 werden die Teilnehmenden im Rahmen eines dreitägigen Workshops die Roboter kennenlernen und erproben. Mit den gewonnenen Erkenntnissen aus dem Erstkontakt wird der Arbeitsplatz entsprechend angepasst, damit die Roboter Mitte des Jahres in den Werkstätten der Caritas Wertarbeit Köln zum Einsatz kommen.
Projektseite: https://www.nextgeneration-mrk.de/
Ansprechpartner:
TCP- und Nullraum-Impedanz zum Umfahren von Objekten mit dem KUKA iiwa
Im Video werden zwei verschiedene Arten der Impedanz Regelung des KUKA iiwa gezeigt: TCP- und Nullraum-Impedanz. Darüber hinaus ist das Umfahren von Objekten mithilfe der Impedanz-Regelung umgesetzt worden.
https://youtu.be/VHrV-nh5oTU
Als erstes werden die zwei verschiedenen Arten der Impedanz-Regelung demonstriert. Zum einen lassen sich Steifigkeiten um die einzelnen TCP-Achsen programmieren. Im Video werden zwei verschiedene Steifigkeiten innerhalb einer Ebene gezeigt. Zum anderen gibt es die Nullraum-Impedanz. Dabei behält der Roboter die Pose des TCPs bei und der Arm kann weggedrückt werden. Wie im Video gezeigt, lässt sich damit ein Objekt „fühlend“ umfahren, während der programmierte TCP-Pfad eingehalten wird.
Projektseite: NextGeneration
Ansprechpartner:
Den KUKA iiwa durch Handführung anlernen
Die Handführung des kollaborativen Roboters KUKA iiwa eignet sich gut zur Programmierung von Raumpunkten. Dies ist sowohl innerhalb eines Programms als auch im T1-Modus des Roboters möglich.
https://youtu.be/v7D4yknlxJI
Im Video wird die Handführung des KUKA iiwa innerhalb eines Programms gezeigt. Der Roboter lässt sich per Hand am Flansch führen, wenn der Anwender den grauen Zustimmtaster betätigt. Nach dem Loslassen, fragt das Programm, ob die aktuelle Position korrekt ist und abgespeichert werden soll. Anschließend können beliebig viele weitere Positionen hinzugefügt werden. Am Ende des Programms werden alle gespeicherten Raumpunkte in der angelernten Reihenfolge abgefahren.
Ansprechpartner:


