
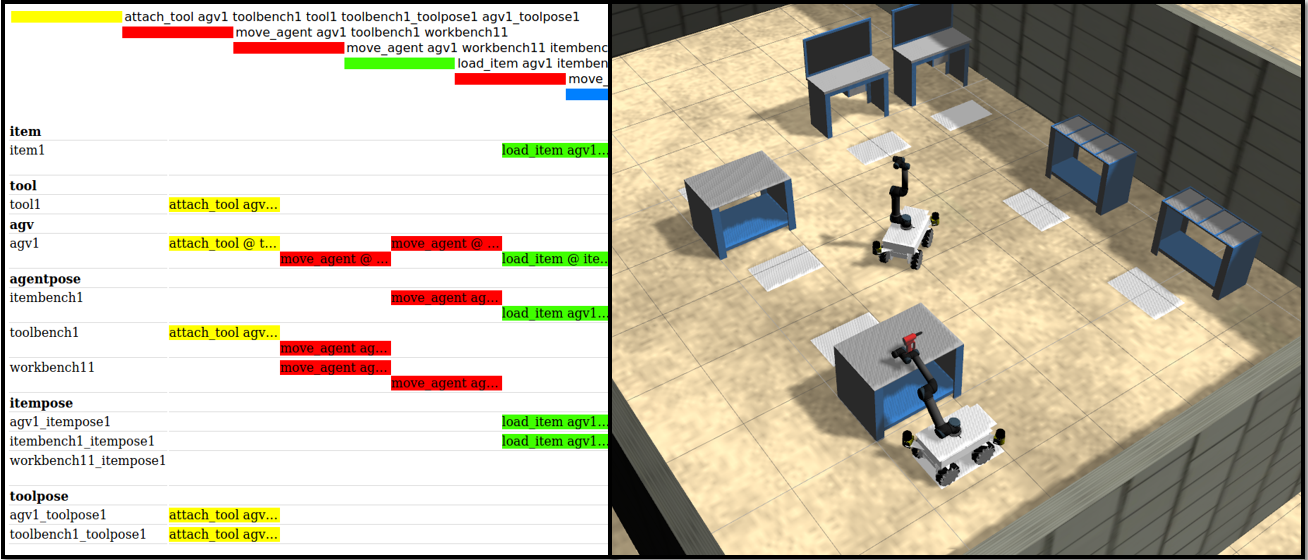
PDDL modeling, ROSPlan and Gazebo simulations are used to improve automatic scheduling algorithms for scenarios with collaborating actors.
Contact person:

PDDL modeling, ROSPlan and Gazebo simulations are used to improve automatic scheduling algorithms for scenarios with collaborating actors.
Contact person:
Kategorie: Gazebo, IGMR, Mobile Robotik, ROS, ROSPlan
Schlagworte: Gazebo, IGMR, MobileRobots, ROS, ROSPlan
Optionen: Antworten ist derzeit nicht möglich | Trackback senden «
Comments are closed.


